3.2.1 Example: Large deflection of a cantilever
Figure 39: Large deflection of a beam subjected to a vertical load.
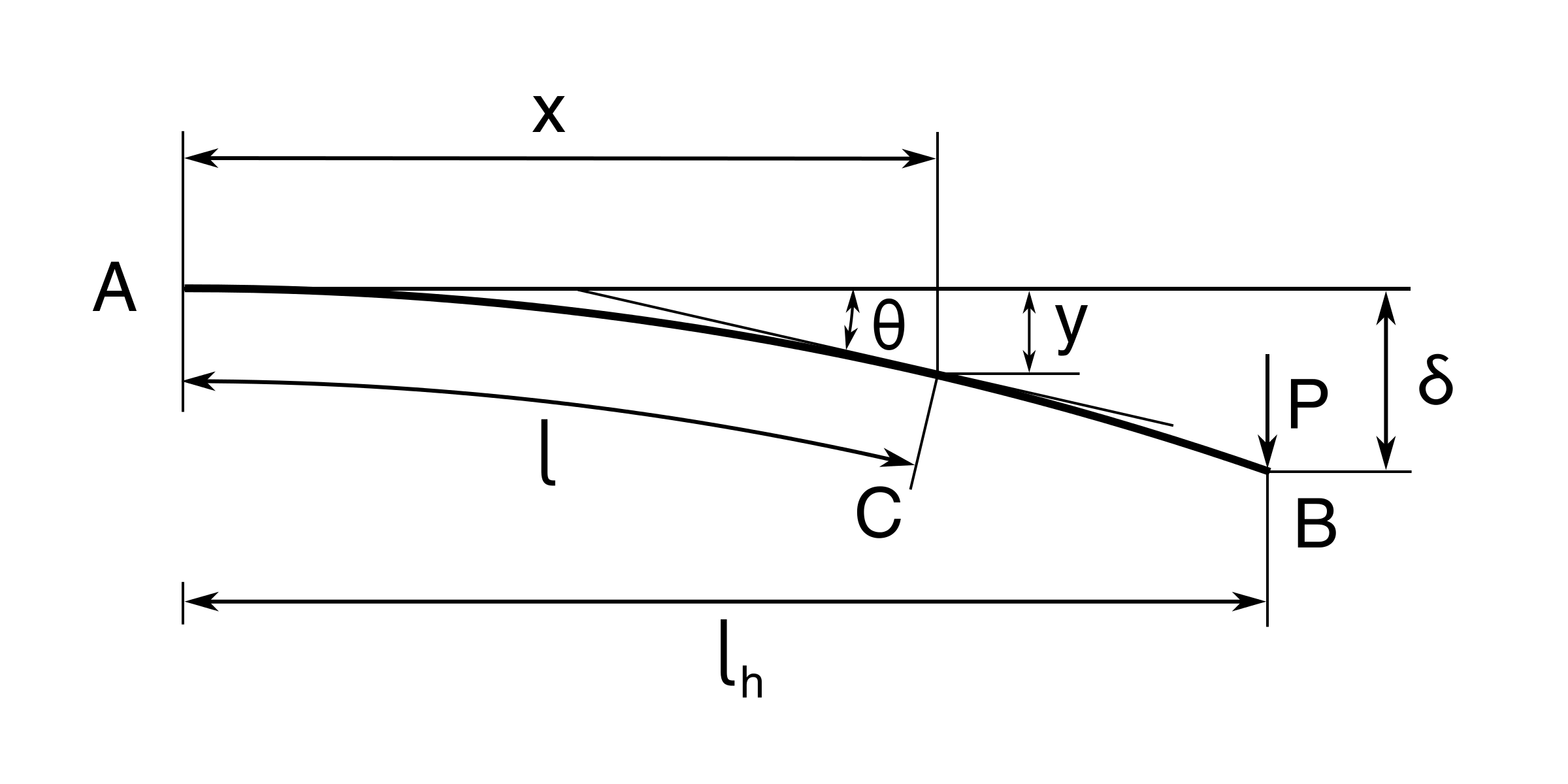
Consider a cantilever (see figure 39) which is anchored at one end \( A \) to a vertical support from which it is protruding. The cantilever is subjected to a structural load \( P \) at the other end \( B \). When subjected to a structural load, the cantilever carries the load to the support where it is forced against by a moment and shear stress [8]. In this example we will allow for large deflections and for that reason we introduce the arc length \( l \) and the angle of inclination \( \theta \) as variables.
All lengths are rendered dimensionless by division with the cantilever length \( L \). The arch length \( l \) ranges consequently from \( l=0 \) in \( A \) to \( l=1 \) in \( B \). Without further ado we present the differential equation for the elastic cantilever as: $$ \begin{equation} \kappa=\frac{d\theta}{L\cdot dl}=\frac{M}{EI} \tag{3.68} \end{equation} $$
where \( \kappa \) denotes the curvature, \( M \) the moment and \( EI \) flexural rigidity. The balance of moments in \( C \) may by computed as \( C \): \( M=P \cdot L(l_h-x) \) which by substitution in (3.68) results in: $$ \begin{equation} \frac{d\theta}{dl}=\frac{PL^2}{EI}(l_h-x) \tag{3.69} \end{equation} $$
From figure 39 we may deduce the following geometrical relations: $$ \begin{equation} \frac{dx}{dl}=\cos \theta,\ \frac{dy}{dl}=\sin \theta \tag{3.70} \end{equation} $$
Further, differentiation of (3.69) with respect to the arch length \( l \) and substitution of (3.70) yields: $$ \begin{equation} \frac{d^2\theta}{dl^2}+\frac{PL^2}{EI}\cos \theta =0 \tag{3.71} \end{equation} $$
For convenience we introduce the parameter \( \alpha \) which is defined as: $$ \begin{equation} \alpha^2=\frac{PL^2}{EI} \tag{3.72} \end{equation} $$
As a result we must solve the following differential equations: $$ \begin{equation} \frac{d^2\theta}{dl^2}+\alpha^2\cos \theta =0 \tag{3.73} \end{equation} $$ $$ \begin{equation} \frac{dy}{dl}=\sin \theta \tag{3.74} \end{equation} $$
with the following boundary conditions: $$ \begin{equation} y(0)=0,\ \theta (0)=0,\ \frac{d\theta}{dl}(1)=0 \tag{3.75} \end{equation} $$
The first two boundary conditions are due the anchoring in \( A \), whereas the latter is due to a vanishing moment in \( B \). The analytical solution of this problem may be found in appendix G, section G.3 in Numeriske Beregninger.
Numerical solution
First, we need to represent (3.73) and (3.74) as a system of first order differential equations. By introducing the conventions \( \theta=z_0,\ \theta'=z_1 \) and \( y=z_2 \) we get: $$ \begin{align} &z_0'=z_1 \nonumber \\ &z_1'=-\alpha^2\cos z_0 \tag{3.76} \\ &z_2'=\sin z_0 \nonumber \end{align} $$
with the boundary conditions $$ \begin{equation} z_0(0)=0,\ z_1(1)=0,\ z_2(0)=0 \tag{3.77} \end{equation} $$
We have to guess the initial value \( \theta'(0) \) such that the condition \( \frac{d\theta}{dl}(1)=0 \) is satisfied.
To do so, we let \( s=\theta'(0)=z_1(0) \) and \( \phi (s)=\theta'(1;s) - 0 = z_1(1) \). Consequently, we have to find \( s=s^* \) such that \( \phi (s^*)=0 \), which with z-variables takes the form: \( s=z_1(0) \).
Additionally we find: $$ \begin{equation} l_h=\frac{s^*}{\alpha^2} \tag{3.79} \end{equation} $$
Due to the nonlinear nature of (3.76) the function
(3.78) will be nonlinear too and we will use the
secant method to find \( s^* \). To start the secant iterations we need two
initial guesses \( s^0 \) and \( s^1 \). Suitable initial guesses may be found
by first looking at \( \phi (s) \) graphically. The python-code
phi_plot_beam_shoot.py produces Figure 40.
# src-ch2/phi_plot_beam_shoot.py;ODEschemes.py @ git@lrhgit/tkt4140/src/src-ch2/ODEschemes.py;
from ODEschemes import euler, heun, rk4
from numpy import cos, sin
import numpy as np
from matplotlib.pyplot import *
# change some default values to make plots more readable
LNWDT=3; FNT=11
rcParams['lines.linewidth'] = LNWDT; rcParams['font.size'] = FNT
N=20
L = 1.0
y = np.linspace(0,L,N+1)
def f(z, t):
"""RHS for deflection of beam"""
zout = np.zeros_like(z)
zout[:] = [z[1],-alpha2*cos(z[0]),sin(z[0])]
return zout
solvers = [euler, heun, rk4] #list of solvers
solver=solvers[2] # select specific solver
alpha2 = 5.0
beta=0.0 # Boundary value at y = L
N_guess = 30
s_guesses=np.linspace(1,5,N_guess)
z0=np.zeros(3)
phi = []
for s_guess in s_guesses:
z0[1] = s_guess
z = solver(f,z0,y)
phi.append(z[-1,1] - beta)
legends=[] # empty list to append legends as plots are generated
plot(s_guesses,phi)
# Add the labels
legend(legends,loc='best',frameon=False) # Add the legends
title('alpha2 = ' + str(alpha2))
ylabel('phi')
xlabel('s')
grid(b=True, which='both')
show()
Figure 40: A plot of \( \phi(s) \) for \( \alpha^2 =5 \) for identification of zeros.

From visual inspection of Figure 40 we find that \( \phi \) as a zero at approximately \( s^*\approx3.05 \). Note, that the zeros depend on the values of \( \alpha \).
Given this approximation of the zero we may provide two initial
guesses \( s^0=2.5 \) and \( s^1=5.0 \) which are 'close enough' for the
secant method to converge. An example for how the solution may be found and presented is given in beam_deflect_shoot.py.
# src-ch2/beam_deflect_shoot.py;ODEschemes.py @ git@lrhgit/tkt4140/src/src-ch2/ODEschemes.py;
from ODEschemes import euler, heun, rk4
from numpy import cos, sin
import numpy as np
from matplotlib.pyplot import *
# change some default values to make plots more readable
LNWDT=3; FNT=11
rcParams['lines.linewidth'] = LNWDT; rcParams['font.size'] = FNT
N=20
L = 1.0
y = np.linspace(0,L,N+1)
def dsfunction(phi0,phi1,s0,s1):
if (abs(phi1-phi0)>0.0):
return -phi1 *(s1 - s0)/float(phi1 - phi0)
else:
return 0.0
def f(z, t):
"""RHS for deflection of beam"""
zout = np.zeros_like(z)
zout[:] = [z[1],-alpha2*cos(z[0]),sin(z[0])]
return zout
alpha2 = 5.0
beta=0.0 # Boundary value at y = L
solvers = [euler, heun, rk4] #list of solvers
solver=solvers[2] # select specific solver
# Guessed values
s=[2.5, 5.0]
z0=np.zeros(3)
z0[1] = s[0]
z = solver(f,z0,y)
phi0 = z[-1,1] - beta
nmax=10
eps = 1.0e-10
for n in range(nmax):
z0[1] = s[1]
z = solver(f,z0,y)
phi1 = z[-1,1] - beta
ds = dsfunction(phi0,phi1,s[0],s[1])
s[0] = s[1]
s[1] += ds
phi0 = phi1
print('n = {} s1 = {} and ds = {}'.format(n,s[1],ds))
if (abs(ds)<=eps):
print('Solution converged for eps = {} and s1 ={} and ds = {}. \n'.format(eps,s[1],ds))
break
legends=[] # empty list to append legends as plots are generated
plot(y,z[:,0])
legends.append(r'$\theta$')
plot(y,z[:,1])
legends.append(r'$d\theta/dl$')
plot(y,z[:,2])
legends.append(r'$y$')
# Add the labels
legend(legends,loc='best',frameon=False) # Add the legends
ylabel(r'$\theta, d\theta/dl, y$')
xlabel('y/L')
#grid(b=True, which='both', axis='both',linestyle='-')
grid(b=True, which='both', color='0.65',linestyle='-')
show()
And the resulting output of solutions is illustrated in Figure 41
Figure 41: Solutions generated with a shooting method for large deflections of a cantilever subjected to a point load.
