Research interests
Artificial Pancreas Trondheim (APT)
Since January 2014 I am working for the Artificial Pancreas Trondheim (APT) research group as a postdoctoral research fellow and secretary.The long-term goal of the research activity is to develop a robust closed-loop glucose control system for patients with diabetes mellitus type 1 and 2 and for intensive-care patients, and to commercialize an artificial pancreas. My role in this research is to develop mathematical models and integrate them in existing model frameworks. I will also contribute within system identification, meal detection and fault detection.
At the same time I am contributing as a coordinator of APT. This includes organizing meetings, collaborations with industrial partners, supervising MSc and PhD students, as well as having initiated the research group in 2012 (although some members of the group have worked on glucose sensors since the 1990's).
It also involves successfully applying for funding of our future research: Since 2014, we have received 1 postdoc grant and 3 PhD grants from "Samarbeidsorganet HMN-NTNU" (the Liaison Committee between the Central Norway Regional Health Authority and NTNU). In 2016 we received a large grant of 24.7 MNOK (i.e. funding for 6–8 positions) from the "Center for Digital Life" initiative by Research Council of Norway. The project title is "Double Intraperitoneal Artificial Pancreas" (2016–2020) and APT is now part of Digital Live Norway (DLN). In January 2019, we received another grant of 18 MNOK from DLN, for a project called "Listening to the patients – Analysis of body sounds for diagnostics and monitoring" (2019–2022).
Prosthetics
The topic of my Master's thesis (January-June 2007) was myoelectric control of multifunction upper-limb prostheses.From July 2008 to December 2012, I continued working on this project as a PhD student, with Øyvind Stavdahl as supervisor and Peter Kyberd as co-advisor. The project title was Robust, coordinated and proportional myoelectric control of upper-limb prostheses and I focused on:
- artifact cancellation
- proportional control
- terminology
- implementation on real prostheses
- clinical assessment
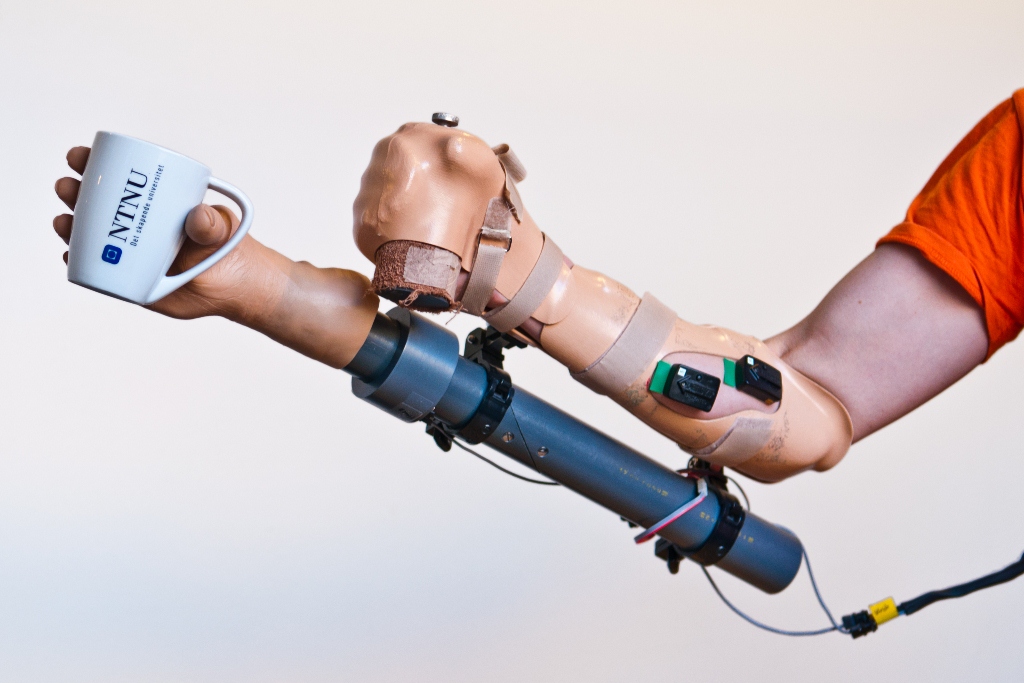
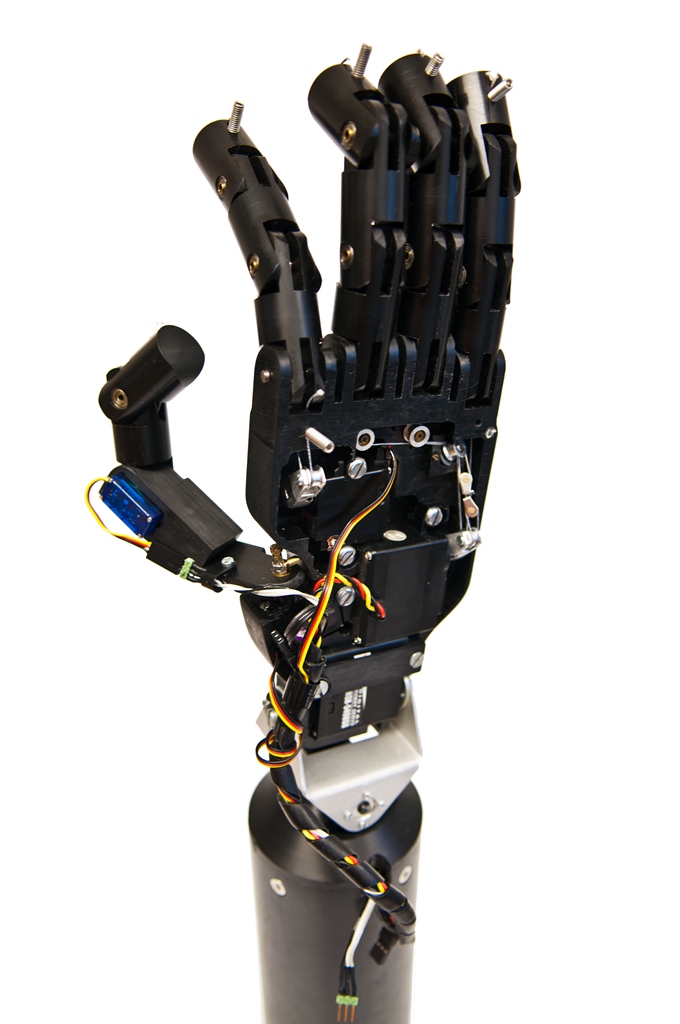
I also worked as a co-advisor for several master students working on these topics, and I had my share of duty work as a Teaching Assistant in Master-level courses. A couple of hands at our Department are shown below: A Motion Control hand fixed to a prosthesis socket developed for normally-limbed subjects, and a robotic hand developed by Kristian Håkonsen:
One of our prosthesis control systems, developed in Spring 2012, is presented in this video: