47th IEEE Conference on Decision and Control, December 9-11, 2008. Cancun, Mexico

Invitation by the CSS President.
 On behalf of the IEEE Control Systems Society (CSS), I am pleased to warmly welcome you to the 47th IEEE Conference on Decision and Control (CDC) in Cancún, México. I thank all the authors for choosing this venue to present their work and all other participants who are contributing to the success of this scientific event with their presence. I hope you are able to enjoy the rich professional and social activities at the Conference, and have a chance to explore our host city, Cancún.
On behalf of the IEEE Control Systems Society (CSS), I am pleased to warmly welcome you to the 47th IEEE Conference on Decision and Control (CDC) in Cancún, México. I thank all the authors for choosing this venue to present their work and all other participants who are contributing to the success of this scientific event with their presence. I hope you are able to enjoy the rich professional and social activities at the Conference, and have a chance to explore our host city, Cancún.
It is hard to believe that we are approaching the 50th anniversary of the CDC. This conference started in 1962 as the Symposium on Adaptive Processes, and used this name for eight years. In 1970, under the guidance of one of my predecessors, Control Systems Society (CSS) President John Zaborsky, CSS decided to broaden the Symposium to include topics related to decision and control systems and changed the name to the IEEE Conference on Decision and Control. John died earlier this year in February, after a long and distinguished career of research and service. He was one of the pioneers who led the merger in 1963 that created IEEE, and established CSS as one of the first IEEE societies. The structure of our current CDC is one of the legacies of the early leaders of CSS.
With its broader charter, the CDC has become the premier annual international conference on systems and control research. The conference provides a great forum for presenting the strongest and most recent results in systems and control research. It also provides an environment for researchers to interact face-to-face with colleagues on technical matters and also socialize in beautiful locations around the world.
This is the first time that the CDC has been held in Latin America. CDC general chairs and their operating committees often choose to hold the Conference in a warm location because of its December schedule, and Cancún continues that excellent tradition. In the first twenty five years of its existence CDC was held exclusively in the United States. Starting with the 1986 CDC in Athens, Greece, the conference has been held periodically outside of the United States in recognition of the growing international community in Systems and Control. Past international CDCs include Brighton, England (1991); Kobe, Japan (1996); Sydney, Australia (2000); Nassau, Bahamas (2004) and Seville, Spain (2005). This practice will continue next year, when the 2009 CDC will be held in Shanghai, China.
Major scientific events such as the CDC require a great deal of effort in planning, administration and operation. This year the CDC team is led was General Chair Chaouki Abdallah and Program Chair Thomas Parisini, and their vice chairs Mario Sznaier, Franco Blanchini, and Marios Polycarpou. Please join me in thanking them as well as all the other members of the organizing and program committees for carefully crafting a superb technical program. Many thanks also go to the members of the Conference Editorial Board and the reviewers for their effort in ensuring a high-quality technical event. The Society is very grateful for the excellent work of these volunteers.
I thank all of you for attending, and hope that the stimulating technical program and the pleasant offerings of our host city Cancún will make the 2008 CDC an exciting and memorable event.
David A. Castañon
42nd President of the IEEE Control Systems Society
Welcome to the 47th IEEE CDC, Invitation by the CDC Chair.
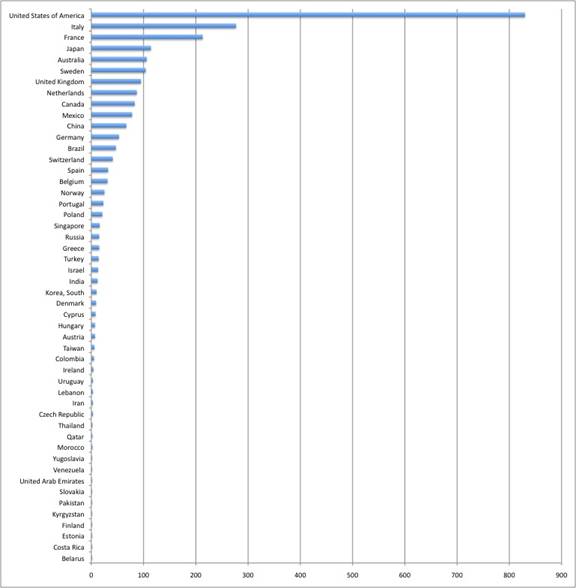
On behalf of the IEEE Control Systems Society and of the Operating Committee of the 47th IEEE Conference on Decision and Control, welcome to Cancun, Mexico. The CDC is the IEEE Control Systems Society's premier annual event and is organized in cooperation with the European Union Control Association (EUCA), the Institute for Operations Research and the Management Sciences (INFORMS), the Society for Industrial and Applied Mathematics (SIAM) and the Japanese Society for Instrument and Control Engineers (SICE). For the first time ever, the CDC is being held in Latin America, and it could not have been held at a more appropriate place! In the best tradition of our CDC attendees, the original settlers of Cancun managed to mix their work and vacation. The City of Cancun is a grand mixture of history and nature coming together to form a perfect getaway setting. Close by, the Mayans used sticks to carry out remarkably accurate astronomical measurements. The Caracol building in Chichén Itza is believed to be a Mayan observatory, whose windows are positioned to line up with significant lines of sight (the setting sun on the spring equinox, certain lines of sight relating to the moon). Even with such crude instruments the Mayans were able to calculate the length of the year to be 365.242 days (the modern value is 365.242198 days). Technicalities It am happy to report that at the time of going to press, the 47th IEEE CDC was shaping up to be among the most successful ones in the long history of our annual meeting. This is evidenced by over 926 final submissions out of 981 accepted papers. To manage such a large conference, I was indeed fortunate to be assisted by an outstanding Operating Committee of dedicated volunteers. Thomas Parisini expertly led the technical Program committee with support from Vice Chairs Mario Sznaier, Marios Polycarpou, and Franco Blanchini. Thomas also managed the over 150 strong Conference Editorial Board, and the 80 members of the Technical program Committee. The credit for the outstanding quality of the technical program therefore goes to Thomas and his vice chairs, who managed a myriad of volunteers to review, edit, recommend, and construct the program you are about to enjoy. Behind the scene are the guiding hands of Huibert Kwakernaak and Pradeep Misra, who keep on enhancing PaperPlaza and answering an infinite supply of questions by the organizers and authors. While the conference chair is ultimately responsible for any problems and mishaps, the credit for a successful conference must be shared by the following individuals: Magnus Egerstedt managed the conference publications with his characteristic professionalism; Bahram Shafai continues to smile while handling countless questions pertaining to registration. Yorai Wardi has solicited, cajoled, threatened and managed the pre-conference workshops. Rogelio Soto, led a successful drive for new and traditional CDC exhibitors. Luis Alvarez-Icaza has been a tireless advocate for students’ attendees and their interests. By choosing Edwin Chong as our finance chair, I knew that the conference finances are well managed. The local arrangements chair Rafael Sandoval and his student volunteers are here to help answer any questions about the conference or about Cancun. Finally, the CDC publicity co-chairs Laura Menini and Luca Zaccarian, have brought class and cool efficiency to the conference web site and to all publicity material. In continuing with successful initiatives started with the earlier CDCs, the registration fees for the workshops are kept low to make it more affordable for our attendees. Furthermore, all workshops were offered in a single day so that workshop attendees need only extend their stay by one extra day instead of two. Taking a cue from the success of semi-plenary lectures from 2005 Joint CDC-ECC, we decided to continue with the format and hope that the extra choice of plenary lecture topics will be of benefit to the attendees. I hope that you have also noticed that the conference is starting on Tuesday rather than Wednesday in order to accommodate overseas attendees. And when you’re not talking shop ….. The city of Cancun is built in a location that was named by the Mayan people for the large number of snakes in the area. Today, a mixture of turquoise blue sea and intricate jungle, joined by some of the finest white sand covering its beaches makes this truly a paradise to behold. After the ancient Mayas occupied this region, nobody else was interested in it. It was in the early 1960's that Cancun began to take shape revealing its many treasures. The City of Cancun has grown to about 450,000 inhabitants. The City is divided into Downtown Cancun and the Hotel Zone (where most of the tourist hotels are located). Many people flock to the Downtown area to haggle with the merchants in the giant mercados. At night, the Downtown area comes alive with a pleasing offering of nightlife. The Hotel Zone is an island shaped like a "7". It is attached to the mainland via the Punta Nizuc Bridge at the southern tip and the Playa Linda Bridge at the northern tip. The Hotel Zone is where most of the fabulous beachfront hotels are located in Cancun as well as a mixture of dining and nightlife spots. Today, Cancun has extended its appeal beyond the local area. When one talks of Cancun, you have to include such places as Isla Mujeres, Contoy, Cozumel, Akumal, Playa del Carmen, Xcaret, Xel-Ha, Tulum, and even Chichén Itza. The organizing committee hopes that you will find some time before and after the CDC to take advantage of what Cancun and the Yucatan peninsula have to offer. Thank you & Bienvenidos a Cancun! Organizing the CDC is a labor of love, and a personal journey for me that started long ago as a graduate student trying to publish his first paper. This journey introduced me to the many leaders and volunteers of our community. Throughout these years, I have marveled at the intensity of some, and the intellect of others. I have felt the frustration of many as they have tried to improve our processes for reviewing and organizing, and shared in the joy of many innovations. I have been on the outside looking in and on the inside trying to channel the energies and creativity of so many of you. So next time you see one of the CSS volunteers, put yourself in their shoes, or better yet, volunteer to help in organizing a conference or to serve the CSS. I promise you will be as satisfied as I am today! On behalf of your CDC 2008 organizing committee, thank you all for the opportunity to serve and I look forward to seeing you in future CDCs. Chaouki T. Abdallah Chair, 47th IEEE CDC The 47th IEEE Conference on Decision and Control is the 2008 flagship technical event sponsored by the IEEE Control Systems Society and continues the tradition of this highly successful conference series. In chairing the Program Committee, I have had an outstanding support from the three Program Vice-Chairs - Franco Blanchini, Marios Polycarpou, and Mario Sznaier. We really worked as a team of friends in all aspects of the program preparation. One of the traditional key attributes of the CDC is the rigorous peer review process for all contributed and invited papers. Following several of the ideas of CDC-ECC'05, a two-stage review process has been established with the aim of improving the quality of reviews and decisions. A large Program Committee of 81 members has been formed covering all main areas of research. After the usual first round of reviews and recommendations handled by the Conference Editorial Board (CEB), all submissions have been re-arranged in areas according to the topic and, for each area, a member of the Program Committee (Area Editor) revised all the recommendations made on the first stage, adding more reviews when needed, and possibly revising the recommendation obtained at the first stage. Overall, thanks to the tireless efforts by the CEB and the Program Committee, a total of 5629 reviews were obtained for the 1937 regular and invited paper submissions, representing an average of 2.9 reviews per paper. Of these, 981 papers were accepted for presentation at the conference giving an acceptance rate of about 50%. It should be mentioned that a separate review process was followed for invited tutorial papers. The conference continues the three-day format that has been dominant in the history. In addition, to the traditional Bode lecture on Thursday, there will be plenary and semi-plenary presentations on the first two days and invited tutorial sessions will be included in the program as well. The conference continues to have a very strong international presence, as indicated in the chart showing the authorships of papers in the conference. To all who have helped in organizing the conference, I am deeply indebted, and offer my sincere thanks and appreciation. A special thanks to Chaouki that gave me this great opportunity to work together with a fantastic group of people! Thomas Parisini Chair, Technical Program Committee General Chair Chaouki T. Abdallah University of New Mexico
chaouki@eece.unm.edu Program Chair Thomas Parisini University of Trieste Vice Program Chair Mario Sznaier Northeastern University msznaier@ece.neu.edu Vice Chair, Invited Sessions Marios Polycarpou University of Cyprus Vice Chair, Tutorial Sessions Franco Blanchini University of Udine Local Arrangements Chair Rafael Sandoval Instituto Tecnológico de Chihuahua Workshops Chair Yorai Wardi Georgia Institute of Technology Student Activities Chair Luis Alvarez-Icaza Univ. Nacional Autónoma de México Finance Chair Edwin Chong Colorado State University Registration Chair Bahram Shafai Northeastern University Publications Chair Magnus Egerstedt Georgia Institute of Technology Publicity Chair Laura Menini University of Rome, Tor Vergata Publicity Chair Luca Zaccarian University of Rome, Tor Vergata Exhibits Chair Rogelio Soto Tecnológico de Monterrey Teodoro Alamo Universidad de Sevilla Ulf T. Jonsson Royal Inst. of Tech. Efraín Alcorta-García Aut. Univ. of Nuevo Leon Ratnesh Kumar Iowa State University Angelo Alessandri University of Genoa Marco Lovera Politecnico di Milano Frank Allgower University of Stuttgart Rogelio Lozano Univ de Techn. de Compiegne Alessandro Astolfi Imperial College London Lorenzo Marconi Univ. di Bologna Marco Baglietto University of Genova Luis Marquez-Martinez CICESE Research Center Er-Wei Bai University of Iowa Daniel Melchor-Aguilar IPICyT John Baillieul Boston Univeristy Rick Middleton Nat. Univ of Ireland Maynooth Michael V. Basin Aut. Univ. of Nuevo Leon Sabine Mondie CINVESTAV-IPN Alberto Bemporad University of Siena Yasamin Mostofi Univ. of New Mexico Pierre-Alexandre Bliman INRIA-Rocquencourt Silviu-Iulian Niculescu CNRS-Supelec Paolo Bolzern Politecnico di Milano Hendrik Nijmeijer Eindhoven Univ. of Techn. Francesco Bullo UC Santa Barbara Brett Ninness Univ. of Newcastle Carlos Canudas de Wit CNRS, GIPSA-Lab Christos Panayiotou University of Cyprus Christos G. Cassandras Boston University George Pappas University of Pennsylvania Bernardino Castillo-Toledo CINVESTAV-GDL Thomas Parisini University of Trieste Alessandro Chiuso Univ. di Padova Pable A. Parrilo MIT Patrizio Colaneri Politecnico di Milano Bozenna Pasik-Duncan Univ. of Kansas Aniruddha Datta Texas A&M Univ. Ian R. Petersen UNSW Australian Def. Acad. Raymond A. de Callafon UC San Diego Daniel E. Rivera Arizona State Univ. Giuseppe De Nicolao Univ. Pavia Mario Rotea Univ. of Mass. - Amherst Claudio De Persis Sapienza Univ. of Rome George A. Rovithakis Aristotle Univ. of Thessaloniki Bart De Schutter Delft Univ. of Technology Karen Rudie Queen's University Michael A. Demetriou Worcester Polyt. Inst. Edgar N. Sanchez CINVESTAV Warren E. Dixon University of Florida Ricardo Sanchez Peña Univ. Politecnica de Catalunya Geir E. Dullerud UIUC Andrea Serrani Ohio State University Richard Scott Erwin Air Force Research Lab. Ralph C. Smith North Carolina State Univ. Martin Fabian Chalmers James C. Spall Johns Hopkins Univ. Rafael Fierro University of New Mexico Mark Spong UIUC Emilio Frazzoli MIT Anton A. Stoorvogel University of Twente James S. Freudenberg Univ. of Michigan Herbert Tanner University of New Mexico Tryphon T. Georgiou Univ. of Minnesota Sophie Tarbouriech LAAS-CNRS Alessandro Giua Univ. di Cagliari Andrew R. Teel UC Santa Barbara Karolos M. Grigoriadis Univ. of Houston Roberto Tempo Politecnico di Torino Christoforos Hadjicostis UIUC Anthony Tzes Univ. of Patras Didier Henrion LAAS-CNRS Maria Elena Valcher Universita' di Padova Ian A. Hiskens University of Wisconsin Paul M.J. Van den Hof Delft Univ. of Tech. Jonathan P. How MIT Cristina Verde Inst. de Ingenieria, UNAM Faryar Jabbari UC Irvine Rene Vidal Johns Hopkins University Ali Jadbabaie University of Pennsylvania George Yin Wayne State Univ. Rolf Johansson Lund University Kemin Zhou Louisiana State University Chair: Thomas Parisini Abdelrahman, M. A. Di Bernardo, M. Ishii, H. Panayiotou, C. Tabuada, P. Alessandri, A. Ding, Z. Ito, H. Papageorgiou, M. Takai, S. Andersson, S. Dugard, L. Jovanovic. M. Pasik-Duncan, B. Tan, X. Ariola, M. Dullerud, G. E. Karcanias, N. Patek, S. D. Tanaka , K. Armaou, A. Dunbar, W. B. Kazantzis, N. Pieper, J. Tanner, H. Arzelier, D. Ezzine, J. Keel, L. H. Pisano, A. Taragna, M. Baglietto, M. Fahroo, F. Kellett, C. Pota, H. R. Tarbouriech, S. Balogh, A. Farooq, M. Kozlowski, K. R. Prandini, M. Tayebi, A. Basile, F. Ferrari-Trecate, G. Kumar, R. Punta, E. Ugrinovskii, V. Basin, M. V. Fialho, I. J. Lagoa, C. Qian, C. Ushio, T. Behal, A. Fradkov, A. L. Lam, J. Ren, W. Varigonda, S. Belta, C. Franch, J. Liu, H. H.-T. Repperger, D. W. Verde, C. Bianchini, G. Freeman, R. A. Loria, A. Rovithakis, G. Villani, L. Borrelli, F. Fridman, L. M. Lovera, M. Saab, S. Vlacic, L. Boukas, E.-K. Garcia, G. Lu, J. Saif, M. Wang, C. Buss, M. Ghorbel, F. Maggiore, M. Salapaka, M. V. Wang, J. L. Cao, Y.-Y. Gokbayrak, K. Marconi, L. Salapaka, S. Watkins, J. Chen, Y. Gokcek, C. Martinelli, F. Savaresi, S. Weibel, S. P. Cheng, X. Gomes Da Silva, J. M Martinez, S. Schoenwald, D. A. Welsh, J. S. Chisci, L. Gong, Q. Mascolo, S. Scorletti, G. Xia, X. Chiuso, A. Grigoriadis, K. M. Matsuno, F. Seatzu, C. Xu, X. Choi, J. W. Hatipoglu, C. Menemenlis, N. Selmic, R. R. Yang, G.-H. Corradini, M. L. Hayakawa, Y. Menini, L. Serrani, A. Yaz, E. Cortes, J. Hayat, M. Meressi, T. Shafai, B. Yedavalli, R. K. Daafouz, J. Heemels, M. Morgansen, K. A. Shen, T. Yue, D. Dabbene, F. Ho, D. W. C. Muske, K. R. Shi, P. Zefran, M. Dabney, J. Hovakimyan, N. Nagarkatti, S. Shima, T. Zhang, H. Dasgupta, S. Hristu-Varsekelis, D. Nguang, S. K. Shtessel, Y. B. Zheng, W. X. De Persis, C. Hull, R. A. Ordonez, R. Stursberg, O. Demetriou, M. A Indri, M. Pait, F. M. Sun, F. President David A. Castañon Boston University Past-President Ted Djaferis University of Massachusetts President-Elect Tariq Samad Honeywell Laboratories Secretary Administrator Mario Sznaier Northeastern University Vice President, Members Claire J. Tomlin UC Berkeley Vice President, Technical Jay Farrell University of California, Rive rside Vice President, Conferences Maria Elena Valcher Universita' di Padova Vice President, Finances Eyad H. Abed University of Maryland Vice President, Publications Yutaka Yamamoto Kyoto University Editor, Trans on Automatic Control Christos Cassandras Boston University Editor, Trans on Control Sys Tech Frank Doyle University of California, Santa Barbara Editor, Control Systems Magazine Dennis Bernstein University of Michigan Editor, eletter Pradeep Misra Wright State University Editor, Conf Editorial Board Thomas Parisini University of Trieste 2008 (appointed) 2008 2009 2010 Balas, G. Abed, E. Bullo, F. Camacho, E. Dixon, W. Allgöwer, F. Ge, S. Chowdhury, F. Fujita, M. Chong, E. Rotea, M. Lin, Z. Hespanha, J. Heck, B. Sun, J. Ohta, Y. Tilbury, D. Misawa, E. Sznaier, M. Parisini, T. Wang, H. Stefanopoulou, A. Tomlin, C. J. Polycarpou, M. CSS Bode Lecture: “Analysis and Design of Steady-state Behavior for
Nonlinear Feedback Systems” Speaker: Professor Christopher I. Byrnes, Washington University Time & Location: 12:15 pm – 1:15 pm, Thursday, December 11, 2008. Grand Coral 1, 2, 3 Abstract. A long term goal in the theory of systems and control is to develop a systematic methodology for the design of feedback control schemes capable of shaping the response of complex dynamical systems, in both an equilibrium and a nonequilibrium setting. In this talk, we will focus primarily on periodic steady-state behavior, a phenomenon that is pervasive in nature and in man-made systems. We will begin with an analysis of the asymptotically stable oscillation in the classical voltage controlled oscillator (VCO), followed by an analysis of Brockett's recent design of a feedback law which creates an asymptotically stable oscillation in a three dimensional, nonholonomic model of an AC controlled rotor with a constant steady-state angular velocity. We will show how to design feedback laws for stabilizable n-dimensional systems so that the existence, periods and stability of periodic responses can be analyzed and shaped when the nonlinear feedback system is driven with an arbitrary periodic input. This design is one application of a general theory developed, jointly with R. Brockett, for the existence of oscillations in a nonlinear dynamical system. The sufficient conditions use a multi-valued analogue of Liapunov functions, in much the same way as the angular variable in polar coordinates is multi-valued. For the VCO the angular variable is the output of an integral controller, while for the AC motor it measures the rotation of the magnetic field. In the general case, the sufficient conditions can be checked point-wise, just as in Liapunov theory, and therefore do not require the knowledge of the trajectories of the system or a cross-section for the dynamics. Moreover, these results can be readily used in the theory of output regulation to shape the nonequilibrium steady-state response of dissipative nonlinear feedback systems. Finally, using the recent solution of the Poincaré Conjecture and more, we show these sufficient conditions are necessary for the existence of an asymptotically stable oscillation - a satisfying result in the spirit of the converse theorems of Liapunov theory. Biography. Christopher I. Byrnes is the Edward H. and Florence G. Skinner Professor of Systems Science and Mathematics at the Washington University in St. Louis. Chris Byrnes has made fundamental contributions to systems and control. His early work applied real and complex algebraic geometry to the solution of several long outstanding problems in the modeling and control of multivariable linear systems. Together with John Baillieul, he also applied these techniques to a study of the number and nature of solutions to the load-flow equations for electrical power systems. In the mid 1980’s, Alberto Isidori and Chris launched a broad research program to develop a systematic feedback design methodology for shaping the behavior of nonlinear control systems. This combined methods drawn from nonlinear dynamics, topology and geometry, aimed at the development of nonlinear enhancements of several of the main ideas and constructs from the frequency domain theory of classical control systems. Among other contributions, this led to the development of zero dynamics, minimum phase systems, normal forms and the steady-state response for nonlinear control systems and their use in solving a broad class of problems, including feedback stabilization and output regulation. In 1991, they received the IEEE George Axelby Best Paper Award for their work on output regulation. In 1993, he and Alberto received the IFAC Automatica Best Paper Prize for a paper in which they solved a longstanding open problem showing that smooth feedback stabilization of the rigid body model of a satellite with just two actuators was impossible, nonetheless designing a feedback law stabilizing the spacecraft about a revolute motion about an axis. Most recently, they have developed a rigorous nonequilibrium theory for the steady-state response of a nonlinear control system. In the 1990’s, Tryphon Georgiou, Anders Lindquist and Chris began a study of the generalized moment problem using methods from topology and nonlinear analysis, ultimately establishing a convex optimization design methodology for a class of moment problems arising in engineering applications such as robust control and spectral estimation. They received the IEEE George Axelby Best Paper Award in 2003 for work applying these methods to Nevanlinna-Pick interpolation. His current interests include the dynamics and topology of nonequilibrium problems in control, notably his joint work with Roger Brockett on the existence and nature of periodic orbits for nonlinear systems. Prior to joining Washington University in 1989, he was on the faculty at the University of Utah, Harvard University and Arizona State University and has held visiting positions in Austria, France, Germany, Italy, Japan, the Netherlands, Sweden, the US and the Academy of Sciences of the former USSR. The author of more than 250 technical papers and books, he received an Honorary Doctorate of Technology from the Royal Institute of Technology (KTH) in Stockholm in 1998 and in 2002 was named a Foreign Member of the Royal Swedish Academy of Engineering Sciences. He is a Fellow of the IEEE and in 2005 was awarded the Reid Prize from SIAM for his contributions to Control Theory and Differential Equations. He will hold the Giovanni Prodi Chair in Nonlinear Analysis at the University of Wuerzburg in the summer of 2009 and spend the 2009-2010 academic year as Gast Professor at KTH, supported by the Swedish Strategic Research Foundation. Time & Location: 12:15 pm – 1:15 pm, Tuesday, December 9, 2008. Grand Coral 1, 2, 3 Biography. Andrew R. Teel received his A.B. degree in Engineering Sciences from Dartmouth College in Hanover, New Hampshire, in 1987, and his M.S. and Ph.D. degrees in Electrical Engineering from the University of California, Berkeley, in 1989 and 1992, respectively. After receiving his Ph.D., he was a postdoctoral fellow at the Ecole des Mines de Paris in Fontainebleau, France. In 1992 he joined the faculty of the Electrical Engineering Department at the University of Minnesota, where he was an assistant professor until 1997. Subsequently, he joined the faculty of the Electrical and Computer Engineering Department at the University of California, Santa Barbara, where he is currently a professor. His research interests are in nonlinear and hybrid dynamical systems, with a focus on stability analysis and control design. He has received NSF Research Initiation and CAREER Awards, the 1998 IEEE Leon K. Kirchmayer Prize Paper Award, the 1998 George S. Axelby Outstanding Paper Award, and was the recipient of the first SIAM Control and Systems Theory Prize in 1998. He was also the recipient of the 1999 Donald P. Eckman Award and the 2001 O. Hugo Schuck Best Paper Award, both given by the American Automatic Control Council. He has delivered plenary lectures at the SIAM Conference on Control and its Applications, the American Control Conference, the IFAC Symposium on Nonlinear Control Systems (NOLCOS), and the Chinese Control Conference. He is a Fellow of the IEEE. Time & Location: 12:15 pm – 1:15 pm, Wednesday, December 10, 2008. Location 1, 2, 3 Abstract. The Internet has attracted the attention of many theoreticians, eager to understand the remarkable success of this diverse and complex artifact. An important aspect of its success has been that simple decentralized algorithms, working with limited information, can produce coherent and purposeful behavior at the macroscopic level. The challenge is to understand how. Biography. Frank Kelly is Professor of the Mathematics of Systems in the University of Cambridge, and Master of Christ's College. His main research interests are in random processes, networks and optimization. He is especially interested in applications to the design and control of networks and to the understanding of self-regulation in CDC Semi-Plenary: “Robust Adaptive Control: The Search for the Holy Grail” Time & Location: 8:00 am – 8:40 am, Tuesday, December 9, 2008. Grand Coral 1 In this talk we present a brief history of the developments in adaptive control and applications over the last 30 years, discuss assumptions, advantages, disadvantages, status of the field today as well as present some of the most recent results. We will explain how the library of tools for practical control design is enriched by the adaptive control methodologies and how these methodologies are used to solve many practical problems without having to worry about the discovery of the ultimate control design which may or may not exist. Biography. Petros A. Ioannou received the B.Sc. degree with First Class Honors from University College, London, England, in 1978 and the M.S. and Ph.D. degrees from the University of Illinois, Urbana, Illinois, in 1980 and 1982, respectively. In 1982, Dr. Ioannou joined the Department of Electrical Engineering-Systems, University of Southern California, Los Angeles, California where he served as a Professor and founder and Director of the Center for Advanced Transportation Technologies. He also held a courtesy appointment with the Department of Aerospace and Mechanical Engineering. His research interests are in the areas of adaptive and nonlinear control, intelligent transportation systems, marine transportation, control of high performance aircraft and control of disc drives. He was visiting Professor at the University of Newcastle, Australia and the Australian National University, the Technical University of Crete and served as the Dean of the School of Pure and Applied Science at the University of Cyprus in 1995. He was a recipient of several Outstanding Research and Presentation Paper Awards and the recipient of a 1985 Presidential Young Investigator Award. Recently he has been appointed as Professor of Electrical Engineering and Information Technologies at the Technical University of Cyprus. Dr. Ioannou is a Fellow of IEEE, Fellow of the International Federation of Automatic Control (IFAC) and the author/co-author of 8 books and over 150 research papers in the area of controls, neural networks, intelligent transportation systems and aerospace. Two of the books he coauthored with former students are used as textbooks for adaptive and nonlinear Control courses at several Universities. CDC Semi-Plenary: “Distributed Control using Decompositions and Games” Time & Location: 8:00 am – 8:40 am, Tuesday, December 9, 2008. Location Grand Coral 3 Abstract. Many control applications have a decentralized structure, where each subunit has access to different information about the system state. Still, most control theory has been developed in a centralized setting, where all measurements are processed together to compute the control signals. This paradigm has conceptual advantages, but also inherent limitations in terms of complexity and integrity. The purpose of this lecture is to show how ideas from convex optimization and game theory may help to go beyond the traditional paradigm to support analysis and synthesis of distributed controllers. Biography. Anders Rantzer is professor and head of department for Automatic Control at Lund University. He was born in 1963 and received a Ph.D. degree in optimization and systems theory from the Royal Institute of Technology (KTH), Stockholm. After postdoctoral positions at KTH and at IMA, University of Minnesota, he joined the faculty of Lund Univeristy in 1993. He was appointed full professor in 1999. The academic year of 2004/05 he held a visiting faculty position at California Institute of Technology. CDC Semi-Plenary: “On Stock Market Modeling and Trading: New Problems for the Control Field” Time & Location: 8:00 am – 8:40 am, Wednesday, December 10, 2008. Location Grand Coral 1 Abstract. The objective of this semi-plenary is to describe a new model for stock and option trading based on control theoretic considerations. The controller is taken to be the amount invested over time and we consider various measures of performance such as trading profit, draw-down and value at risk. In contrast to classical approaches to trading which are based on a stochastic Wiener process description for the evolution of the stock price, our new paradigm involves a rather standard low order state space model and control is implemented via a classical static output feedback. In addition to simplicity of this new formulation, another factor motivating this new line of research is the following: Approaches to trading in the literature, based on the use of a Wiener process for stock price prediction, typically involve the questionable assumption that historical volatility can be used “going forward.” Said another way, in the case of most past literature, price volatility is assumed to be time-invariant. In recognition of the time-varying “character” of volatility, our new approach does not include a stochastic model for the evolution of stock price. Instead, we simply treat the stock price as an external uncontrolled input belonging to a rather unstructured family P. Given the setting above, we seek to provide various robust performance certifications with respect to the family P. For example, an important goal is to robustly guarantee “excess returns” which exceed some standard benchmark such as buy-and-hold. Finally, the obvious should be noted: Robust performance guarantees involving the model do not imply that the same performance will result when a real time series for stock price is substituted for the price. Therefore, an integral part of this line of research involves extensive back-testing using data derived from real financial markets. Biography. B. Ross Barmish received the Bachelor’s degree in Electrical Engineering from McGill University in 1971. In 1972 and 1975 respectively, he received the M.S. and Ph.D. degrees, both in Electrical Engineering, from Cornell University. From 1975 to 1978, he served as Assistant Professor of Engineering and Applied Science at Yale University. From 1978 to 1984, he was as an Associate Professor of Electrical Engineering at the University of Rochester and in 1984, he joined the University of Wisconsin, Madison, where he is currently Professor of Electrical and Computer Engineering. From 2001 to 2003, he was with the Department of Electrical Engineering and Computer Science at Case Western Reserve University, where he served as Department Chair while holding the Nord Professorship. Professor Barmish is a Fellow of IEEE (contributions to robust control) and has received the Best Paper Award for Journal Publication on two consecutive occasions from the International Federation of Automatic Control. Over the years, he has been involved in a number of IEEE Control Systems Society activities such as associate editorships, conference chairmanships and prize paper committees. He has also served as a consultant for a number of companies and is the author of the textbook New Tools for Robustness of Linear Systems, Macmillan, 1994. Over the last year, his research has concentrated on the modeling and trading of markets for stocks and options. CDC Semi-Plenary: “Optimal Adaptive Neurocontrol” Optimal control design methods are well developed for linear systems, and rely on the solution of certain matrix design equations of the Riccati equation type. Design techniques are off-line, and require knowledge of the system dynamics, i.e. A and B matrices. Robust optimal methods such as LTR guarantee performance in the event of modeling uncertainties. Optimal design for nonlinear systems is problematic as it relies on the solution of design equations in the Hamilton-Jacobi class (HJB, HJI), which may not be solvable for general nonlinear systems. HJ solution also requires full knowledge of the system dynamics. Adaptive Controllers use on-line parameter learning methods to produce feedback controllers with guaranteed performance for systems with unknown dynamics. However, adaptive controllers do not generally provide optimal control solutions. Indirect methods have been developed, which require system identification and then Riccati equation solution. Inverse optimal methods for general nonlinear systems do provide adaptation to minimize a resulting performance index (alfc- adaptive Lyapunov function candidate), though it is not of one’s own choosing. Adaptive controllers generally minimize a least-squares type (tracking) error. Adaptive systems that optimize a prescribed general performance index of one’s own selection are hard to come by. In this talk we will explore a new class of Optimal & Adaptive feedback control structures for continuous-time systems that are based on reinforcement learning techniques, specifically policy iteration and Adaptive Dynamic Programming (ADP). Such techniques have primarily been developed in the past decades for discrete-state (Markov) or discrete-time systems. We will develop and rigorously analyze, in a continuous-time framework, learning and adaptation structures that allow the on-line design of feedback controllers that are optimal. Full knowledge of the system dynamics is not needed. Both linear and nonlinear systems are tractable. Relations with the operation of some biological structures in the human brain will be drawn. Biography. Frank L. Lewis Fellow IEEE, Fellow IFAC, Fellow U.K. Institute of Measurement & Control, PE Texas, U.K. Chartered Engineer, is Distinguished Scholar Professor and Moncrief-O’Donnell Chair at University of Texas at Arlington’s Automation & Robotics Research Institute. He obtained the Bachelor's Degree in Physics/EE and the MSEE at Rice University, the MS in Aeronautical Engineering from Univ. W. Florida, and the Ph.D. at Ga. Tech. He works in feedback control, intelligent systems, and sensor networks. He is author of 5 U.S. patents, 199 journal papers, 315 conference papers, and 12 books. He received the Fulbright Research Award, NSF Research Initiation Grant, ASEE Terman Award, and Int. Neural Network Soc. Gabor Award 2008. Received Outstanding Service Award from Dallas IEEE Section, selected as Engineer of the year by Ft. Worth IEEE Section. Listed in Ft. Worth Business Press Top 200 Leaders in Manufacturing. He was appointed to the NAE Committee on Space Station in 1995. He is an elected Guest Consulting Professor at both South China University of Technology and Shanghai Jiao Tong University. Founding Member of the Board of Governors of the Mediterranean Control Association. Helped win the IEEE Control Systems Society Best Chapter Award (as Founding Chairman of DFW Chapter), the National Sigma Xi Award for Outstanding Chapter (as President of UTA Chapter), and the US SBA Tibbets Award in 1996 (as Director of ARRI’s SBIR Program). TuTA06: Game Theory and Networks Grand Coral 3 Organizer: Tamer Basar (University of Illinois at Urbana-Champaign) Game theory, with its various derivatives, has had tremendous impact on developments in hard and soft sciences as well as engineering during the second half of the twentieth century. And today, it continues to be a major driving force behind conceptual as well as technological developments in various disciplines. One of these areas is networks or networking, particularly communication networks, where users (players in the parlance of game theory) seek to ship traffic (such as packets) from specific sources to targeted destinations over heterogeneous media consisting of wireline and wireless links. Among the decisions that each user is faced with are (i) at what (flow) rate to send her traffic from a particular source to a particular destination, and (ii) how to distribute this rate over the available links connecting the particular source-destination pair---both driven by performance considerations, such as minimum loss (of packets) and minimum delay. There are also the questions of how to bid for the resources (such as bandwidth) that are offered by a service provider, and at a higher level, how to establish an electronic market for a fair and efficient exchange and distribution of goods and services, and how to provide a secure and overall trustworthy network. Game theory, in its both cooperative and noncooperative renditions, provides a perfect paradigm for a systematic study and resolution of several of these critical issues. This tutorial session at the 2008 CDC is intended to introduce the audience to some of the essential ingredients of game theory, particularly non-cooperative game theory, and discuss the current state of its applications in networking research. As described below, the three speakers in the session will cover a broad range of topics and issues, from conceptual to computational. Presentations: · “An Introduction to Non-Cooperative Game Theory: Modeling, Solution Concepts, and Computational Tools,” T. Basar, University of Illinois at Urbana-Champaign, USA (40 min.). · “Learning in Games,” Asuman Ozdaglar, MIT, USA (40 min.). · “A Game-Theoretic View of the Economics of ISP-ISP and ISP-Customer Interactions,” R. Srikant, University of Illinois at Urbana-Champaign (40 min.). TuTC05: Systems and Synthetic Biology - A Tutorial Introduction Grand Coral 1 Organizer: Mathukumalli Vidyasagar (Tata Consultancy Services) Systems biology marks the coming of age of the life sciences, wherein the traditional approach of studying individual components in isolation is being replaced by a holistic approach aimed at understanding the behaviour of complex systems. While it has long been known that such an approach is ultimately the only realistic way to understand the working of biological systems and discover cures for complex multi-factorial diseases such as cancer, only in recent times has there been enough data available to pursue such a path. Even so, much of our understanding of the complex signaling pathways is at best sketchy due to a) the lack of complete information for many of the important signaling pathways and b) lack of knowledge of the parameters needed to model the interactions between the components of such pathways. These difficulties have in turn led to a parallel approach involving the assembling of well understood components into a system. This approach, called synthetic biology, holds out the promise of being able to develop novel biological approaches to production of antibiotics, vaccines and so on. The three talks in this tutorial are geared towards control theorists who are interested in tackling problems in biology. The first talk provides the necessary biology background and explains the big problems in biology. The second talk addresses the issue of parameter estimation and stochastic approaches to modeling complex biological systems. The final talk will address the problem of designing biological systems for specific functions. Presentations: · “Introduction to Systems Biology and the Human Body as a Dynamical System,” M. Vidyasagar, Tata Consultancy Services, India, (40 min.) · “Stochastic Modeling and Analysis of Gene Networks,” Mustafa Khammash, University of California, USA (40 min.). · “Bio-Circuits by Design: the Exciting Opportunities for Engineering Biology,” Hana El-Samad, University of California, USA, (40 min.). WeTA01: Trends in Nonlinear Control Grand Coral 2 Organizer: Alessandro Astolfi (Imperial College London and University of Rome) Nonlinear control theory (and its applications) has undergone substantial developments and become one of the most active and important areas of research in the control systems community. There are several introductory and advanced textbooks devoted to nonlinear control theory and control has been integrated into the standard graduate curricula in engineering and applied mathematics. In addition, nonlinear control theory is at the basis of the successful development and initiation of several research directions: it plays a fundamental role in the development of systems' biology, in the understanding of complex communication systems, power systems and cooperative systems, in the study of event-driven and agent-based systems, and in the development of an ever increasing number of industrial applications. Nonlinear control theory embraces a large number of research areas, which use diverse tools and methods, each well-suited for specific problems. It is therefore extremely difficult to give a tutorial presentation that represent the joint effort of the international research community, and one has to follow personal inclinations. This tutorial emphasizes three research directions that (we believe) are important, both from a methodological perspective and from the applications point of view. As a consequence we have left aside several important topics, which would deserve equal attention, for example robust and adaptive control, optimal control, model predictive control, passivity- and energy-based control, variable structure control, differential geometric methods, Lyapunov design, anti-windup methods, singular perturbation methods. The goal of this tutorial is therefore to illustrate selected research themes that have undergone substantial developments in the past few years, and to highlight related open problems and possible avenues for future research, namely: the role of invariant manifolds in nonlinear control and observer design, the theory of hybrid systems, and the theory of nonlinear digitally controlled systems. Presentations: WeTC07: Control Theory and Finance Coral Garden 1 Organizer: J.A. Primbs (Stanford University) The goal of this session is to provide a tutorial level introduction to applications of control and systems theory to finance. The session is also intended to provide entry points into the diverse field of finance by highlighting a few of the most interesting interactions between finance and control theory. The session introduces areas of finance that may be of interest to the control community. In particular it will cover how systems theory underlies fundamental finance results (Luenberger), how control theory is used to address dynamic portfolio problems (Primbs), the dynamical systems aspects of asset price modeling (Rathinam), and areas of finance that are becoming increasingly coupled with physical and engineered systems (Yamada). The next section provides abstracts for the four talks that make up the session Presentations: · “Systems Theory in Basic Finance,” David G. Luenberger, Stanford University, USA (40 min.) · “Control Methods for Financial Portfolios”, James A. Primbs, Stanford University, USA (40 min.) · “Modeling of Trader Behavior and Asset Dynamics,” Muruhan Rathinam, University of Maryland, USA (20 min.). · “The Interaction of Financial and Engineered Systems,” Yuji Yamada, U. of Tsukuba, Japan, (20 min.). ThTA05: Computer Vision and Control Grand Coral 1 Organizer: O. Camps (Northeastern University) The goal of computer vision is to make useful decisions about real physical objects and scenes from images. It brings together imaging devices, computers, and sophisticated algorithms to solve problems in a wide range of areas including, autonomous navigation, surveillance, medicine, human-computer interfaces and image database retrieval, among others. However, vision systems remain fragile to occlusion, clutter, and variable appearance and have limited application outside structured environments. During the past decades systems theory has achieved a high degree of maturity, leading to powerful and sophisticated tools that have allowed for solving difficult practical problems. Central to the success of this effort is a viewpoint that emphasizes both robustness and complexity issues, seeking for computationally tractable solutions, or in cases where the underlying problem is intrinsically hard, for tractable relaxation with suboptimality certificates. The potential of these ideas extends beyond traditional control theory and in fact, they hold the key in addressing and solving many of the issues mentioned above as demonstrated by the talks in this session. The Computer Vision and Control tutorial session at the 2008 CDC illustrates the successful application of system theoretic motivated ideas to several practically relevant problems arising in the context of computer vision: tracking, image segmentation, image modeling, and video segmentation and classification. It offers a good cross-section of the current state of the field and points to open problems. The talks show how the use of system theoretic tools in computer vision have led to either new theoretical results, solutions to open problems or a better understanding of the phenomena involved, while offering a good cross-section of the current state of the field and pointing to problems that remain open. Presentations: · “Tracking Deforming Objects Using Particle Filtering and Geometric Active Contours,” Allen Tannenbaum, Georgia Institute of Technology, USA (30 min.). The 47th CDC is offering ten one day pre-conference workshops on Monday December 8, 2008. The workshops will be offered based on viable attendance. The 47th CDC reserves the right to cancel non-viable workshops. In the event that a workshop is canceled the workshop fee will be refunded in full. All workshops are full-day workshops, and will take place from 9 am – 4:30 pm.. The locations for the different workshops will be made available at the conference. Workshop 1. Stochastic Hybrid Systems: Theory and Applications Organizers: Alessandro Abate (Stanford University, USA) John Lygeros (ETH, Switzerland) Shankar Sastry (University of California, Berkeley, USA) Additional Participants: Manuela Bujorianu (Twente, The Netherlands) Joao Pedro Hespanha (UC Santa Barbara, USA) Jianghai Hu (Purdue, USA) Joost-Pieter Katoen, RWTH Aachen, Germany) Summary: Engineering systems like communication networks or automotive and air traffic control systems, financial and industrial processes like market and manufacturing models, and natural systems like biological and ecological environments exhibit compound behaviors arising from the compositions and interactions between their heterogeneous components. Hybrid Systems are mathematical models that are by definition suitable to describe such complex systems. The effect of the uncertainty on the discrete and continuous dynamics---both endogenously and exogenously to the system---is virtually unquestionable for biological systems and often inevitable for engineering systems, and naturally leads to the employment of stochastic hybrid models. Stochastic Hybrid Systems are then probabilistic models suitable at describing the dynamics of variables presenting interleaved and interacting continuous and discrete components. The goal of the workshop is to present the state-of-the-art on the research in Stochastic Hybrid Systems. By bringing together a heterogeneous panel of experts that will present their research results on Stochastic Hybrid Systems, the workshop targets a wide audience: from the student, interested in learning about this model formalism; to the researcher, involved in the forefront research on these models; to the practitioner, engaged in the application of these models in various studies (for instance, in Engineering and Biology). Workshop 2. Distributed Control of Robotic Networks Organizers: Francesco Bullo (University of California, Santa Barbara, USA) Jorge Cortes (University of California, San Diego, USA) Sonia Martinez (University of California, San Diego, USA) Summary: The emerging discipline of distributed control of robotic networks sits at the intersection of different areas such as distributed algorithms, parallel processing, control, and estimation. The main objective of the workshop is to provide an introduction to the modeling, analysis, and design of distributed coordination algorithms for robotic networks. The workshop lectures will provide a self-contained exposition of notions and tools from various disciplines that are relevant in cooperative control: these include graph-theoretic notions (connectivity, adjacency and Laplacian matrices), distributed algorithms from computer science (leader election, basic tree computations) and from parallel processing (averaging algorithms, convergence rates), and geometric models and optimization (Voronoi partitions, proximity graphs). The workshop will also introduce a model for robotic networks that helps formalize and analyze coordination algorithms. Drawing on classical notions from distributed algorithms, we will provide complexity measures that characterize the performance and implementation costs of coordination algorithms. Finally, the workshop will present various algorithms for coordination tasks such as connectivity maintenance, rendezvous, and deployment, putting special emphasis on the analysis of their correctness and complexity. The workshop lectures are based on the book with the same title written by the instructors, freely available at www.coordinationbook.info. Workshop 3. Adaptive Sensing via Approximate Stochastic Dynamic Programming Organizer: Edwin K. P. Chong (Colorado State University, USA) Summary: This is a full-day workshop on the topic of adaptive sensing based on approximation methods for stochastic dynamic programming. Adaptive sensing involves actively managing sensor resources to achieve a sensing task, such as object detection, classification, and tracking, and represents a promising direction for new applications of discrete event system methods. Adaptive sensing is most naturally posed as a stochastic control problem with interesting properties: (1) the objective of the control is the sensing performance; (2) the sensed data serves as feedback for control purposes; and (3) the control action affects the sensed data and hence the feedback available for control. We describe an approach to adaptive sensing based on approximately solving a partially observable Markov decision process (POMDP) formulation of the problem. Such approximations are necessary because of the very large state space involved in practical adaptive sensing problems, precluding exact computation of optimal solutions. We review the theory of POMDPs and show how the theory applies to adaptive sensing problems. We then describe a variety of approximation methods, with examples to illustrate their application in adaptive sensing. The examples also demonstrate the gains that are possible from nonmyopic methods relative to myopic methods. Workshop 4. Foundations for Reconfigurable and Autonomous Cyber-Physical Systems Organizers: Emilio Frazzoli (MIT, USA) Ketan Savla (MIT, USA) Additional Participants: The workshop will discuss applicable ideas and tools from a broad range of disciplines. The lectures in the workshop will provide a comprehensive overview of relevant techniques, including distributed control and resource allocation with communication constraints, distributed algorithms, group behavior, distributed inference, game theory and mechanism design, non-Bayesian inference, model approximation through model reduction and scaling effect, computationally tractable approximation methods, and robustness of large interconnected systems. Application examples will include autonomous ground and air vehicles, UAV-borne sensor networks, city-wide and campus- wide sensor networks, as well as social networks. Workshop 5. Homogeneous Higher-Order Sliding-Mode Control Organizer: Leonid Fridman (National Autonomous University of Mexico, Mexico) Additional Participants: Arie Levant (Tel-Aviv University, Israel) The desired outcome of the workshop, i.e. delivering tools for the HOSMC analysis and design, will be achieved via covering the following topics Workshop 6. Robotics in Challenging and Dangerous Environments Organizers: Ayanna Howard (Georgia Tech, USA) Summary: In recent years, much progress has been made in the area of developing robotic systems for challenging and dangerous environments. Examples include operations in rough terrain, air, sea, underground, and in space. These environments present serious challenges to autonomy, mobility, manipulation, sensing, and computing. Although humans are superior to robots in their ability to react to unexpected situations and their adaptation to new scenarios, it may be impractical to send humans into these environments. In most cases, it may be more feasible to advance robot technology than to send humans. In other cases, it may significantly reduce the risk to humans to have robotic systems cooperatively interact with humans when a human presence is necessary. To understand current problems that arise during operations in these challenging environments, this workshop will explore issues and difficulties faced when fielding robots in these environments. Techniques that provide promising results to address these problems will also be discussed, including an overview of state-of-the-art technology for fielded robotic systems that address operations in unstructured environments. This workshop will provide a venue for researchers to bring together expertise and experience from different challenging environments and share approaches, ideas, solutions, and results. Topics include: design, autonomous operations, sensing and data analysis, human-robot interaction, and operational systems in challenging environments. Workshop 7. The Continuing Legacy of Roger W. Brockett Organizers: John Baillieul (Boston University, USA) P.S. Krishnaprasad (University of Maryland, College Park, USA) Additional Participants: Anthony Bloch (University of Michigan, USA) Navin Khaneja (Harvard University, USA) A. Stephen Morse (Yale University, USA) Jan Willems (Katholieke Universiteit Leuven, Belgium) Wing-Shing Wong (Chinese University of Hong Kong) Summary: Roger Brockett, one of the founders of geometric nonlinear control theory and many other areas of the field, will turn 70 in 2008. To celebrate this occasion, a one-day workshop is planned at the 2008 CDC in Cancun. The workshop will present a set of 8 lectures highlighting some of the areas to which Brockett has made lasting contributions. Topics to be covered include: The stability of nonlinear feedback systems; Nonlinear geometric control theory; Stochastic systems and nonlinear filtering; The applications of Lie Theory to nonlinear systems and control; Robotics; Formal languages for motion description; Computer vision; Geodesic and gradient flows on manifolds; Information based control and specification complexity; Minimum attention control; and Quantum control. Workshop 8. Modeling, Estimation and Control in Neuroscience Organizer: Sridevi Sarma (MIT, USA) Additional Participants: Wilson Truccolo (Brown University, USA) Todd Coleman (University of Illinois at Urbana-Champaign, USA) Ming Cheng (Brown University, USA) Uri Eden (Boston University, USA) Fadi Karameh (American University, Beirut, Lebanon) Steve Massaquoi (MIT, USA) Jeffrey M. Moehlis (University of California Santa Barbara, USA) David Terman (Ohio State University, USA) Kazutaka Takahashi (University of Chicago, USA) Jose Carmena (UC Berkeley, USA) Bijoy Ghosh (Texas Tech University, USA) Partha Mitra (Cold Spring Harbor Labs, USA) Nitish Thakor (Johns Hopkins University, USA) Summary: Recent technological and experimental advances, such as bio-imaging and the capability to record signals from neural systems have led to an unprecedented increase in the types and volume of data collected in neuroscience experiments. This data, though extremely rich and valuable, has brought neuroscientists to a road block. This workshop will discuss methods of signal processing, modeling and estimation from both data and biophysical laws to understand how single neurons and networks of neurons encode information. System-level modeling of how neural activity gets processed amongst various parts of the brain to ultimately control motor behavior, and to what extent is this predictable based on neural activity, pathways, connections, and muscle dynamics will also be covered. Specifically, decoding environmental stimuli and behavior from neural recordings will be addressed along with its application to brain-machine interfaces and control of prosthetics. Finally, control of neural activity using deep brain stimulation to treat various neurological diseases such as Parkinson disease and epilepsy will be discussed. Workshop 9. Identification of Quantized Systems with Applications Organizers: Le Yi Wang (Wayne State University, USA) George Yin (Wayne State University, USA) Antonio Vicino (University of Siena, Italy) Graham Goodwin (The University of Newcastle, Australia) Additional Participants: Andrea Garulli (University of Siena, Italy) Juan Carlos Aguero (The University of Newcastle, Australia) Summary: Signal quantization is an essential requirement for communication, hence an integral part of any information processing systems in a networked setting. They are exemplified by sensor networks, networked control systems, mobile agents, tele-medicine, networked computing, etc. Identification of such systems must account for information limitation due to quantization. Recently, there have been growing interests and research efforts to understand many fundamental issues involved in system identification of quantized systems. This workshop aims to consolidate current understanding, motivate further development, and stimulate applications of this field. This workshop will cover two complementary frameworks in system identification with quantized observations: stochastic noise and unknown-but-bounded noise. It will discuss a wide spectrum of fundamental and unique aspects of the topics, including identification input design, identification algorithms, computational complexity, error bounds, convergence of estimates, convergence speeds, efficiency, etc. In addition, time and space complexity issues will be investigated in the framework of Fisher and Shannon information theories. Their implications in communication system design and resource allocation will be rigorously explored. Some examples will be presented with simulation results to demonstrate the methods and their utilities. Workshop 10. Nonlinear Power Flow Control Design: Utilizing Exergy, Entropy, Static and Dynamic Stability, and Lyapunov Analysis Organizers: R.D. Robinett, III (Energy, Resources & Systems Analysis Center, Sandia National Laboratories, USA) D.G. Wilson (Energy, Resources & Systems Analysis Center, Sandia National Laboratories, USA) Summary: The goal of the workshop is to introduce the attendees to the Higher Order Sliding Mode Control (HOSMC) algorithms for robust control system design. Numerous real-life applications will illustrate the efficiency of HOSMC. The desired outcome of the workshop, i.e. delivering tools for the HOSMC analysis and design, will be achieved via covering the following topics Celebrating Pontryagin’s Contributions to Control Theory Organizer: Kishan Baheti, National Science Foundation, USA Additional Participants: A. Kurzhanski (Moscow State University, Russia) P. V. Kokotovic (University of California at Santa Barbara, USA) A.V. Balakrishnan (University of California at Las Angeles, USA) Summary: Place/Time/Date: Coral I, Dec. 11 (Thursday), 8:15 am – 9:15 am NSF Initiative on Cyber-Physical Systems: Opportunity for Computer Science and Control Engineering Organizers: Kishan Baheti, National Science Foundation, USA Michael Branicky, National Science Foundation, USA Summary: Time/Date: Dec. 9 (Tuesday), 1:20 pm – 1:50 pm Place: TBD Outstanding Chapter Award For an outstanding Chapter of the CSS based on the level of its activities and innovations in promoting new activities and services. Wang Jianliang, Chair, IEEE Singapore Control Systems Chapter. CSS Distinguished Member Award To recognize significant technical contributions and outstanding long-term service to the CSS by an individual who has been a member of the CSS for at least five years: Rick Middleton, The University of Newcastle CDC Best Student-Paper Award To recognize excellence in a paper presented at the Conference on Decision and Control, whose primary author is a Student Member of the IEEE. Finalists. Johan Karlsson, Royal Institute of Technology (Anders Lindquist), “Weight Selection for Gap Robustness with Degree-Constrained Controllers,” by Johan Karlsson, Tryphon Georgiou and Anders Lindquist. Necmiye Ozay, Northeastern University (Mario Sznaier), “A Sparsification Approach to Set Membership Identification of a Class of Affine Hybrid Systems,” by Necmiye Ozay, Mario Sznaier, Constantino Lagoa and Octavia Camps. Amir Ali Ahmadi, Massachusetts Institute of Technology (Pablo A. Parrilo), “Non-monotonic Lyapunov Functions for Stability of Discrete Time Nonlinear and Switched Systems,” by Amir Ali Ahmadi and Pablo A. Parrilo. Adolfo Anta, University of California, Los Angeles (Paulo Tabuada), “Space-time Scaling Laws for Self-triggered Control,” by Adolfo Anta and Paulo Tabuada. CSM Outstanding Paper Award For an outstanding article or column published in the IEEE Control Systems Magazine during the two calendar years preceding the year of the award, based on impact on and benefit to CSS members: Sonia Martínez, Jorge Cortes, and Francesco Bullo, “Motion coordination with distributed information,” pp. 75-88, Aug. 2007. TCST Outstanding Paper Award For an outstanding paper published in the IEEE Transactions on Control Systems Technology during the two calendar years preceding the year of the award, based on originality, relevance of the application, clarity of exposition, and demonstrated impact on control systems technology: Masayuki Fujita, Hiroyuki Kawai, and Mark Spong, “Passivity-based Dynamic Visual Feedback Control for Three Dimensional Target Tracking: Stability and L2 -gain Performance Analysis,” 15:1, pp. 40-52, 2007. George S. Axelby Outstanding Paper Award For outstanding papers published in the IEEE Transactions on Automatic Control during the two calendar years preceding the year of the award, based on originality, clarity, potential impact on the theoretical foundations of control, and practical significance in applications: Giuseppe C. Calafiore and Marco C. Campi, “The Scenario Approach to Robust Control Design,” 51:742-753, 2006. Control Systems Technology Award To recognize outstanding contributions to control systems technology either in design and implementation, or in project management. This award may be conferred on an individual or a team: Tariq Samad, Honeywell Laboratories Antonio Ruberti Young Researcher Prize To recognize distinguished cutting-edge contributions by a young researcher to the theory or application of systems and control. Rodolphe Sepulchre, Université de Liège All conference attendees must register. All registered participants will receive conference proceedings on a CD-ROM. A reduced registration rate is available for students, retirees, and life members. Every registration includes Opening and Closing Receptions as well as the Conference Banquet on Thursday, December 14. Registration Fees. On-site rates for registration fees apply at the following rates: Society Member: $535.00 Non-Member: $665.00 Reduced (retiree/student): $270.00 Registration Desk Hours. Registration desk will be open Monday–Thursday, December 8–11 at times specified below. Date/Day Morning Hours Afternoon Hours December 7 (Sunday) None 4:00pm – 7:00pm December 8 (Monday) None 4:00pm – 7:00pm December 9 (Tuesday) 7:00am – 12:00pm 2:00pm – 6:00pm December 10 (Wednesday) 7:00am – 12:00pm 1:00pm – 6:00pm December 11 (Thursday) 7:00am – 12:00pm 1:00pm – 6:00pm The CD-ROM containing the conference proceedings will be distributed at the conference registration desk along with the registration package. Additional CD-ROMs will be available for purchase at the conference. Opening Reception: Monday, Dec. 8, 7:30 - 10:30 pm, Sunrise Terrace Snorkeling at Maroma Beach This adventure takes place at Maroma Beach which was rated by Discovery Channel as the most beautiful Beach in the world in 2002. It is located 35 minutes from Cancun and only 15 minutes from the shore to the Second Largest Reef Barrier in the world by boat. Marina facilities include a restaurant, gift shop, showers, and lockers to make your visit more pleasurable. You will visit two different reefs and snorkel in the incredible second largest reef barrier. You will immerse yourself in the natural sea landscapes and watch colorful tropical fish. Jungle Tour (located in Cancun Hotel Zone) The Jungle Tour features a world filled with exotic tropical birds, plants and marine life. While driving your own mini speedboats, experience guides lead you on a thrilling ride through the dense mangroves to the turquoise waters of the Caribbean where you can snorkel (1hr) on the largest reef in the Western Hemisphere before water-rally heads back. SCUBA Diving in Cancun (located in Cancun Hotel Zone) Scuba diving is becoming a popular activity for our visitors over the past few years. Crystal clear water and vast coral reef barrier surrounds Cancun, there for scuba diving sites are unlimited. Depths of 35ft. up to 60ft. And temperature average 70° through out the year, these are just a few aspects divers look for in Cancun. All dives are guided by a certified PADI dive master and are in small groups of 4 or 6 divers per dive master. The dive boats are big, and fully designed for Scuba Diving, they have all of the emergency equipment on board and have inboard diesel engines. Mayan Encounter (Visiting the Coba Maya ruins and an authentic Mayan Village) Experience the amazing beauty of the authentic Mayan world during this expedition that will take you deep into the tropical jungle where the ancient Mayas built the tallest pyramid in the Yucatan Peninsula, the place where their descendants have survived under harsh conditions, in small communities, far away from the “civilized” world as we know it. This we can assure you, will be an unforgettable experience, full of fun, culture, nature, history and archeology, all in one adventure-filled day, a privilege that you too may share in during your stay in the magical Mexican Caribbean. Chichen Itza
Famous Mayan City (2 ½ hours from the conference hotel) See the real World of The Maya. This time machine tour takes you back 2000 years and is easily the most famous site in the Yucatan Peninsula today! The pyramid Kukulcan is rising over 90 feet including the Jaguar Shrine. Chichen-Itza is easily the most famous site in the Yucatan Peninsula and the massive site takes at least a day to explore. Chichen-Itza, which was founded in 445 AD and inhabited until 1204 AD, when it was mysteriously abandoned. Mayan Zip Line A combination of Mayan culture, breath-taking natural treasures, delicious Mayan gastronomical treats and unforgettable adventure activities! Break away for half a day and travel to Chikin-Ha, an exclusive, protected natural sanctuary that is only a few minutes drive out of Playa del Carmen. The journey in Chikin-Ha begins with an easy bike ride through the farmlands of Don Silvano where you will enjoy the surrounding jungle scenery and learn about local subsistence farming. You will learn about the natural aspects of cenotes and you will be able to enjoy its refreshing water swimming, snorkeling or just floating on one of our big luxury inner tubes. Tulum Archeological Site & Xel-Ha Natural Aquarium (1 ½ hour from Cancun) The Citadel Tulum perched atop limestone cliffs and overlooking the rugged turquoise coastline, was possibly the first Mayan structure sighted by the Spanish in the 16th century. Tulum is Quintana Roo's most famous site with approximately 60 individual structures of the Post-Classic period. Archaeologists believe that the city was a trading post and functioned as one of the important ports along the coast of the Yucatan. The aquatic sanctuary of Xel-Ha fed simultaneously by subterranean freshwater springs and mixed with Caribbean seawater, is reserved for breeding countless species of colorful tropical fish. Suntan lotions and chemical products are not allowed in the area to protect the sensitive environment. Xcaret Eco-Archaeological Park Xcaret was for more than ten centuries, one of the most important Mayan ceremonial centers and seaport. Today, it is an incredible archaeological Family Park for you to enjoy a marvelous day, while discovering its infinite historic and natural wonders. Go back in time many centuries evoking and enjoying a mystic Mayan swim, an unbelievable experience floating thirty minutes inside the underground river, through impressive millenary caverns submerged in crystal clear sacred cenote waters that flow from deep inside the earth. More information and pricing may be obtained from Mr. Jorge Orozco Esquenazi (mailto:jorozco@ivicancun.com) or by visiting http://www.mexicoquest.com/cancun_ing.htm. IEEE Conference on Decision and Control & Chinese Control Conference 2009 The 2009 combined IEEE Conference on Decision and Control (CDC) and the Chinese Control Conference will be held Wednesday through Friday, Dec. 16 – 18, 2009 in Shanghai, China. This will be the third time that CDC has been held outside the United States in the Asia-Pacific region, and it is very fitting that it is being held in China, where numbers of new IEEE members are increasing so rapidly. The annual IEEE Conference on Decision and Control (CDC) is internationally recognized as the premier scientific and engineering conference dedicated to the advancement of the theory and practice of systems and control. The CDC brings together an international community of researchers and practitioners to discuss new research results, perspectives on future developments, and innovative applications relevant to decision making, automatic control, and related areas. Information about 2009 CDC can be found at the web site: http://people.bu.edu/johnb/ChinaCDC.html General Co-Chairs: Lei Guo and John Baillieul Program Co-Chairs: Daizhan Cheng and Faryar Jabbari KEY DATES Deadline for all submissions and proposals: Feb 1, 2009 Notification of Acceptance/Rejection: July, 2009 Final manuscript submission deadline: Sept, 2009 American Control Conference 2010 The 2010 American Control Conference (ACC) will be held Wednesday through Friday, June 30 – July 2, 2010 at the Baltimore Marriott Waterfront in Baltimore, Maryland. The ACC is the annual conference of the American Automatic Control Council (AACC). The 2010 ACC, held in cooperation with IFAC, will present a technical program consisting of new developments in theory and practice in the area of automatic control. The technical program will consist of papers in regular technical sessions, invited sessions, special sessions, and pre-conference tutorial/workshop sessions. Special themes for the 2010 ACC include: Control in Medicine, Control of Robotic Systems, and Control of Green Energy Systems. Information about 2010 ACC can be found at the web site: http://www.a2c2.org/conferences/acc2010/ General Chair:
Glenn Masada, Program Chair: Richard Braatz KEY DATES Deadline for all submissions and proposals: Sept 15, 2009 Notification of Acceptance/Rejection: Jan 31, 2010 Final manuscript submission deadline: Mar 15, 2010 CDC Corporate Sponsors and Exhibitors are listed below: · Taylor & Francis - Gold Sponsor http://www.taylorandfrancisgroup.com/ Building on two centuries' experience, Taylor & Francis has grown rapidly over the last two decades to become a leading international academic publisher. With offices in London, Brighton, Basingstoke and Abingdon in the UK, New York and Philadelphia in the USA and Singapore and Melbourne in the Pacific Rim, the Taylor & Francis Group publishes more than 1000 journals and around 1,800 new books each year, with a books backlist in excess of 20,000 specialist titles. Taylor & Francis are providers of quality information and knowledge that enable our customers to perform their jobs efficiently, continue their education, and help contribute to the advancement of their chosen markets. Our customers are researchers, students, academics and increasingly professionals. · StatoilHydro – Gold Sponsor http://www.statoilhydro.com/ StatoilHydro is an integrated technology-based international energy company primarily focused on upstream oil and gas operations. Headquartered in Norway, StatoilHydro have more than 30 years of experience from the Norwegian continental shelf, pioneering complex offshore projects under the toughest conditions. Our culture is founded on strong values and a high ethical standard. Exhibitors: Springer Verlag SIAM Quanser Wiley IEEE For information concerning exhibitors, please contact the Exhibits Chair, Prof. Rogelio Soto, (details on Organizing Committee pages).
Report from the CDC Program Chair.

Conference Committees.
Conference Organizing Committee. [2008]














Technical Program Committee.
CSS Conference Editorial Board.
Control Systems Society Officers.
IEEE CSS Executive Committee.














IEEE CSS Board of Governors.
Plenary Lectures and the CSS Bode Lecture.

CDC Plenary: “Hybrid Dynamical Systems and Robust Feedback Control”
Speaker: Professor Andrew R. Teel, University of California, Santa Barbara
 Abstract. A bouncing ball, a network of impulsive biological oscillators, a sampled-data and networked control system, and a supervisory-based feedback control loop are examples of hybrid dynamical systems. These systems contain variables that, in some regions of the state space, change continuously and, in other regions, change instantaneously. Hybrid systems have been studied extensively over the last two decades, with important contributions generated by computer scientists, mathematicians, and control engineers. Interest from the control community is due, primarily, to the recognition that advances in modeling and analysis of hybrid systems may spawn a variety of novel feedback control ideas.
Abstract. A bouncing ball, a network of impulsive biological oscillators, a sampled-data and networked control system, and a supervisory-based feedback control loop are examples of hybrid dynamical systems. These systems contain variables that, in some regions of the state space, change continuously and, in other regions, change instantaneously. Hybrid systems have been studied extensively over the last two decades, with important contributions generated by computer scientists, mathematicians, and control engineers. Interest from the control community is due, primarily, to the recognition that advances in modeling and analysis of hybrid systems may spawn a variety of novel feedback control ideas.
This lecture emphasizes a dynamical systems approach to hybrid systems. It describes a modeling framework and a set of structural properties under which the dynamic behavior of a hybrid system is robust. Robustness means that small perturbations to the system lead to correspondingly small changes in the qualitative behavior of the system. This feature is a requirement for feedback control systems of all types, including hybrid control systems. Moreover, the properties that yield robustness also confer to hybrid systems many classical stability analysis tools from continuous-time and discrete-time nonlinear systems. These and other hybrid-specific tools serve as the genesis for several hybrid feedback control algorithms. A selection of analysis tools and control algorithms are presented to illustrate recent advances in the field of hybrid systems.CDC Plenary: “Network Control: Modeling the Internet”
Speaker: Professor Frank Kelly, University of Cambridge

One of the more fruitful approaches has been based on a framework that allows a congestion control algorithm such as Jacobson's TCP to be interpreted as a distributed mechanism solving a global optimization problem. The framework is based on fluid models of packet flows, and the form of the optimization problem makes explicit the equilibrium resource allocation policy of the algorithm, which can often be restated in terms of a fairness criterion, such as proportional fairness or max-min fairness. The dynamics of the fluid models allow the machinery of control theory to be used to study stability, to understand TCP’s success and its potential for improvement, and to inform the development of future routing and rate control algorithms.
A further strand of theoretical work has developed a connection level model, that represents the randomly varying number of flows present in a network. Stability on this time-scale is interpreted in terms of recurrence of a Markov chain. In joint work with Kang, Lee and Williams we have begun to understand more about the heavy traffic behavior of this Markov chain, and hence about the performance of joint routing and congestion control. Under proportional fairness and a local traffic condition, the diffusion approximation has a product form invariant distribution with a strikingly simple interpretation in terms of dual random variables, one for each of a set of virtual resources.
large-scale systems.
Frank Kelly has been awarded the Guy Medal in Silver of the Royal Statistical Society, the Lanchester Prize of INFORMS, and the Naylor Prize of the London Mathematical Society. In 2005 he received the IEEE Koji Kobayashi Computer and Communications Award, for his work on dynamic routing in telephone networks and congestion control in the Internet. He has chaired the Advisory Board of the Royal Institution/Cambridge Mathematics Enrichment Project, and the Management Committee of the Isaac Newton Institute for Mathematical Sciences, and has served on the Scientific Council of EURANDOM and the Conseil Scientifique of France Telecom. He spent the academic year 2001-2 as a visiting professor at Stanford University. From 2003-6 he served as Chief Scientific Adviser to the United Kingdom's Department for Transport. He is a Fellow of the Royal Society, a Trustee of RAND Europe, and a member of the Council of
the University of Cambridge.Speaker: Professor Petros A. Ioannou, University of Southern California
 Abstract. The control system which can force any unknown time varying plant meet the performance requirements with adequate robustness properties is considered as the corresponding Holy Grail in control design. Adaptive control has often been viewed as one of the approaches that could meet this challenge or at least a step towards that direction. Despite the truly remarkable advances in the theory of adaptive control and successful applications there is no justification that we discovered such a miraculous control system.
Abstract. The control system which can force any unknown time varying plant meet the performance requirements with adequate robustness properties is considered as the corresponding Holy Grail in control design. Adaptive control has often been viewed as one of the approaches that could meet this challenge or at least a step towards that direction. Despite the truly remarkable advances in the theory of adaptive control and successful applications there is no justification that we discovered such a miraculous control system. Speaker: Professor Anders Rantzer, Lund University

In particular, we will reconsider well established methods for decomposition of large scale optimization problems by introduction of dual variables. These can be interpreted as prices in a market mechanism serving to achieve mutual agreement between different subproblems. The same idea can be used for decomposition of large scale control systems, with dynamics in both decision variables and prices. The dynamics bring interesting new phenomena. For example, expected future prices could be highly relevant for todays decisions.
Decomposition using price mechanisms is closely connected to game theory. A large-scale control system can be viewed as a game involving two types of players; subunits optimizing their local control action in response to prices, and intermediate players adjusting the prices to counteract disagreements between neighboring subunits. The game can be analysed under appropriate convexity assumptions and there is a close connection to the theory of potential games.
Anders Rantzer has been associate editor of IEEE Transactions on Automatic Control and several other journals. He has served on the Board of Governors of IEEE Control System Society and the Council Of The European Union Control Association. He is a Fellow of IEEE and a member of the Royal Swedish Academy of Engineering Sciences. He is also a winner of the SIAM Student Paper Competition and the IFAC Congress Young Author Price. His research interests are in modeling, analysis and synthesis of control systems, with particular attention to uncertainty, optimization and distributed control.Speaker: Professor B. Ross Barmish, University of Wisconsin

Speaker: Professor Frank L. Lewis, University of Texas at Arlington
Time & Location: 8:00 am – 8:40 am, Wednesday, December 10, 2008. Location Grand Coral 3
 Abstract. Naturally occurring and biological systems often have optimal behavior, for they have limited resources in terms of fuel/energy or reaction time. Likewise, many manmade systems, including electric power systems and aerospace systems, must be optimal due to cost and limited resource factors such as energy or fuel.
Abstract. Naturally occurring and biological systems often have optimal behavior, for they have limited resources in terms of fuel/energy or reaction time. Likewise, many manmade systems, including electric power systems and aerospace systems, must be optimal due to cost and limited resource factors such as energy or fuel.Tutorial Sessions
Pre-Conference Workshops.
Henk Blom (NLR, The Netherlands)
Munther A. Dahleh (MIT, USA)
Jonathan P. How (MIT, USA)
Asuman Ozdaglar (MIT, USA)
Pablo Parrilo (MIT, USA)
Jeff Shamma (Georgia Tech, USA)
Igor Boiko (Honeywell and University of Calgary, Canada)
Alessandro Pisano (University of Cagliari, Italy)
Yuri Shtessel (The University of Alabama in Huntsville, USA)
Edward Tunstel (JHU Applied Physics Laboratory, USA)
John Baras (University of Maryland, USA)
Daniel Liberzon (University of Illinois, USA)
Riccardo Barbieri (Harvard, USA)
Marco Casini (University of Siena, Italy)
Special CDC Sessions.
As soon as “The Pontryagin Maximum Principle” was published in 1956-1958, the principle became an instant celebrity. In addition to control theory, Pontryagin has made pioneering contributions to topology and differential game theory. This year a conference was organized in his honor in Moscow to celebrate his one hundredth birth anniversary. Pontryagin lost his eyesight at the age of eleven because of a freak accident and was schooled by his mother. The purpose of the session is to inform the CDC participants the life and legacy of the great mathematician from Russia. The speakers will share their personal experiences with Pontryagin and how his work influenced many researchers of his generation. The session will include a video presentation by Pontryagin that was recorded in 1972, when he gave several lectures on differential games while visiting UCLA.
The session will provide overview of recent activities at the National Science Foundation that are important to the Control Systems and Computer Science researcher communities. The presentation will include details on the recently announced funding opportunities in cyber-physical systems (CPS). The term CPS refers to the tight conjoining of and coordination between computational and physical resources. We envision that the cyber-physical systems of tomorrow will far exceed those of today in terms of adaptability, autonomy, efficiency, functionality, reliability, safety, and usability. Research advances in cyber-physical systems promise to transform our world with systems that respond more quickly (e.g., autonomous collision avoidance), are more precise (e.g., robotic surgery and nano-tolerance manufacturing), work in dangerous or inaccessible environments (e.g., autonomous systems for search and rescue, firefighting, and exploration), provide large-scale, distributed coordination (e.g., automated traffic control), are highly efficient (e.g., zero-net energy buildings), augment human capabilities, and enhance societal wellbeing (e.g., assistive technologies and ubiquitous healthcare monitoring and delivery).Control Systems Society Awards.
Conference Information.
Conference Registration
Conference Proceedings
Social Events
Newcomer's Reception: Tuesday, Dec. 9, 7:30 - 9 pm, Sunrise Terrace
Awards Reception: Tuesday, Dec. 9, 7:30-9:00 pm, Viña del Mar restaurant
Conference Banquet: Wednesday, Dec.10 13, 7:30 - 10:30 pm, Sunrise terrace
Closing Reception: Thursday, Dec. 11, 7:30 - 10:30 pm, Sunrise TerraceLocal Information: In and Around Cancun.








Upcoming Conferences.
Sponsors and Exhibitors
![]()
![]()
We aim to deliver long-term growth and continue to develop technologies and manage projects that will meet the world’s energy and climate challenges in a sustainable way. StatoilHydro is listed on NYSE and Oslo Stock Exchange.
![]()


![]()
