Postdocs and students working on autonomous ships at NTNU
This is a list over postdocs, PhD students and MSc students at NTNU who work on topics related to autonomous ships. This includes students affiliated with the Autosea, Autoferry, Autosit, Autosight, Autobarge and ORCAS projects, as well as the centre for research-based innovation SFI Autoship.
Postdocs
Name |
Topic | Supervisors | Dept. | |
 |
Alojz Gomola, |
Dynamic and simulation-based risk modeling for operational decision support and verification | Ingrid Utne | IMT |
 |
Human-machine interfaces for remote crane operation | Ole Andreas Alsos | ID | |
 |
Trym Tengesdal, |
Risk-based COLAV and anti-grounding | Tor Arne Johansen Edmund Brekke |
ITK |
Previous postdocs
Name |
Topic | Supervisors | Dept. | |
 |
Ramesh Chandra, |
Intelligent algorithms for ASVs | Robin T. Bye | ITK |
 |
Automation and autonomy for autonomous urban ferries | Morten Breivik, Edmund Brekke, Egil Eide |
ITK | |
 |
Astrid H. Brodtkorb, |
Planning and re-planning of safe routes for autonomous ships | Asgeir Sørensen, Murat Arcak |
IMT |
 |
Praveen Jain, |
Long-term vessel prediction | Adil Rasheed Edmund Brekke |
ITK |
 |
Giorgio Kufoalor, |
The SB-MPC collision avoidance method / Strategic and tactical collision avoidance | Tor Arne Johansen, Edmund Brekke |
ITK |
 |
Rachid Oucheikh, |
Path planning, collision avoidance, situational awareness | Robin T. Bye, Ottar L. Osen, Ibrahim A. Hameed |
IIR |
 |
Marilia Ramos, |
Risk management of autonomous ships | Ingrid Bouwer Utne, Jan Erik Vinnem, Ali Mosleh |
IMT |
 |
Børge Rokseth, |
Risk management of autonomous ships | Ingrid Bouwer Utne | IMT |
 |
Christoph Thieme, |
Risk Analysis and Modelling of Autonomous Marine Systems | Ingrid Bouwer Utne | IMT |
 |
Erik Wilthil, |
Situational awareness for autonomous urban ferries | Edmund Brekke, Morten Breivik, Egil Eide |
ITK |
PhD candidates
Name |
Topic | Supervisors | Dept. | |
 |
Melih Akdag, |
Autonomous ship collision avoidance (COLREGS 2.0 and AIS 2.0) | Tor Arne Johansen, Thor Inge Fossen |
IIK |
 |
Martin Baerveldt, |
Unifying Simultaneous Localization and Mapping (SLAM) and Extended Object Tracking (EOT) for autonomous vessels in confined waterways | Edmund Brekke, Peter Slaets, Øyvind Kåre Kjerstad |
ITK |
 |
Nicholas Dalhaug, |
When other ships come out of their docks – radar-stereo tracking | Edmund Brekke, Annette Stahl |
ITK |
 |
Spencer August Dugan, |
Risk acceptance and operational constraints in risk modeling of autonomous operations | Ingrid Utne | IMT |
 |
Eirik Fagerhaug, |
Explainable AI for Autonomous Ships | Ottar Osen | IIR |
 |
Henrik Flemmen, |
Non-GNSS localization for autonomous ships | Edmund Brekke, Rudolf Mester, Torleiv Bryne, Kostas Alexis, Annette Stahl |
ITK |
 |
Luka Grgicevic, |
Decision support systems for autonomous vessels | Ottar Osen, Robin Bye, Thor Inge Fossen |
IMT |
 |
Chuanqi Guo, |
Risk analysis and risk management for Autonomous Passenger Ferries (Autoferry) | Stein Haugen, Ingrid Utne, Nicola Paltrinieri |
IMT |
 |
Aurora Haraldsen, |
Collision Avoidance for Autonomous Vehicles in Dynamic Environments | Kristin Pettersen, Martin Syre Wiig |
ITK |
 |
Øystein Kårstad Helgesen, |
Multi-Sensor Tracking for Autonomous Surface Vehicles | Edmund Brekke, Annette Stahl |
ITK |
 |
Audun Gullikstad Hem, |
Fusion between AIS and exteroceptive sensors Master thesis:Maritime multi-target tracking with radar and asynchronous transponder measurements |
Edmund Brekke, Thor Inge Fossen |
ITK |
 |
Lukas Herrmann, |
Ship-shore radar network | Egil Eide, Edmund Brekke |
IES |
 |
Thomas Johansen, |
Risk Analysis and Risk Modeling for Autonomous Ships | Ingrid Utne | IMT |
 |
Susanna Dybwad Kristensen, |
Online risk modeling of autonomous ships | Ingrid Utne, Astrid Brodtkorb |
IMT |
 |
Simon Lexau, |
Docking for ASVs | Anastasios Lekkas, Morten Breivik |
ITK |
 |
Michael Ernesto Lopez, |
Pose estimation and extended object tracking | Annette Stahl, Edmund Brekke |
ITK |
 |
Andreas Solnørdal Madsen, |
AI decision transparency in autonomous maritime operations | Runar Ostnes | IIR |
 |
Emil Martens, |
Multisensor detection for autonomous ships | Annette Stahl, Edmund Brekke, Rudolf Mester |
ITK |
 |
Josef Matous, |
Distributed cooperative control of marine multi-vehicle systems | Kristin Pettersen, Claudio Paliotta, Damiano Varagnolo |
ITK |
 |
Daniel Menges, |
Digital twin and situational awareness for autonomous ships | Adil Rasheed, Edmund Brekke |
ITK |
 |
Trym Antonsen Nygård, |
Sensor fusion for docking – stereo-based localization | Annette Stahl, Edmund Brekke |
ITK |
 |
Felix-Marcel Petermann, |
Interaction Design | Ole Andreas Alsos | ID |
 |
Namireddy |
Energy management for autonomous ferry | Mehdi Zadeh | IMT |
 |
Rutledal |
Human factors, remote monitoring and control (Autoferry) | Thomas Porathe, Runar Osnes |
IMT |
 |
Robert Skulstad, |
Data-based ship motion prediction in offshore operations | Houxiang Zhang, Thor Inge Fossen, Bjørnar Vik |
IIK |
 |
Lars-Christian Ness Tokle, |
Sensor fusion for autonomous ferry | Edmund Brekke, Annette Stahl, Egil Eide, Esten Ingar Grøtli |
ITK |
 |
Kjetil Vasstein, |
Trustworthy autonomy for marine ferries from using video games | Edmund Brekke, Tor Arne Johansen |
ITK |
 |
Erik Veitch, |
Land-based Operation of Autonomous Ships | Ole Andreas Alsos | ID |
 |
Jin Zhang, |
Integrated safety and security analysis of cyber-physical systems using system engineering approach | Jingyue Li, Mary Ann Lundteigen |
IDI |
Graduated PhDs








MSc candidates 2022-2023
Name |
Topic | Supervisors | Dept. | |
 |
Hanne-Grete Alvheim, |
Target Tracking in the Presence of Wakes Using a Wake Augmented IPDA | Edmund Brekke, Audun Hem |
ITK |
 |
Daniel Bjerkehagen, |
Simultaneous calibration and localization | Edmund Brekke, Esten Ingar Grøtli |
ITK |
 |
Endre Didriksen, |
Automatic docking algorithm for passenger ferries with geometric constraints and floating dock | Håkon Hagen Helgesen | ITK |
 |
Harald Minde Hansen, |
Kollisjonsunngåelse for autonome USVer med manøvreringsbegrensninger | Kristin Pettersen, Glenn Ivan Bitar, Else-Line Malene Ruud |
ITK |
 |
Håvard Grimsbo Hansen, |
Automatic docking algorithm for passenger ferries with geometric constraints and floating dock | Håkon Hagen Helgesen | ITK |
 |
Erling Syversveen Lie, |
Coverage Control of Marine Vehicles | Kristin Pettersen, Josef Matous, Simon Andreas Hagen Hoff |
ITK |
 |
Peder Hofstad Lycke, |
Situation dependent tuning of a collision avoidance algorithm for surface vessels | Tor Arne Johansen | ITK |
 |
Erik Daniel Haukås Moe, |
Optical flow for tracking maritime objects | Edmund Brekke, Lars-Christian Tokle |
ITK |
 |
Sondre Olimb, |
FMCW radar detection, tracking and velocity estimation in Trondheim Harbor | Egil Eide | IES |
 |
Mathias Thoresen Paasche, |
360 degrees view for the operator of milliAmpere 2 | Edmund Brekke, Øystein Kårstad Helgesen, Felix-Marcel Petermann |
ITK |
 |
Odin Aleksander Severinsen, |
The PMBM filter - Graphical Model Techniques | Edmund Brekke, Lars-Christian Tokle |
ITK |
 |
Andreas Steinsmo, |
Trajectory planning and collision avoidance for ASVs | Morten Breivik | ITK |
 |
Christopher Strøm, |
Can Deep Learning Really be Applied to Model-Based Multi-Object Tracking? | Edmund Brekke, Rudolf Mester, Tom Arne Pedersen, Geir Hamre, Erik Wilthil |
ITK |
 |
Andreas Øie, |
Automatic labelling of infrared images | Håkon Hagen Helgesen | ITK |
MSc candidates 2021-2022
Name |
Topic | Supervisors | Dept. | |
 |
Karine Borgerud, |
Combined Safety and Security Analysis on an Autonomous Passenger Ferry Using CyPHASS | Mary-Ann Lundteigen | ITK |
 |
Nicolai Brummenæs, |
Adaptive Stress Testing applied to a Maritime Object Detection System | Øyvind Smogeli, Erik Wilthil |
IMT |
 |
Hilmar Nypan Claes, |
Design an autonomous passenger ferry for urban areas | Einar Hareide, Ole Andreas Alsos, Leander Spyridon Pantelatos |
ID |
 |
Sondre Ek, |
Design of simulator for researching autonomous marine vessels | Ole Andreas Alsos | ID |
 |
Aleksander Elvebakk, |
SLAM for Autonomous Ferries | Kostas Alexis, Erik Wilthil |
ITK |
 |
Torbjørn Reitan Fyrvik, |
Methods for Ocean Mapping with Combined ASV and AUV Platforms | Asgeir Sørensen, Jens E. Bremnes |
IMT |
 |
Magnus Haukeland, |
Visual-Inertial Calibration and Navigation for Autonomous Ferry | Tor Arne Johansen Håkon Hagen Helgesen |
ITK |
 |
Hanna Waage Hjelmeland, |
Validation of marine collision avoidance systems using Adaptive Stress Testing | Anastasios M. Lekkas, Ole Jacob Mengshoel |
ITK |
 |
Ola Kirkerud, |
COLREGs-Aware Collision Avoidance for Autonomous Surface Vehicles using Encounter-Specific Artificial Potential Fields | Morten Breivik | ITK |
 |
Karen Solem Knutsen, |
Analysis of AIS data for COLREGS compliance | Tor Arne Johansen, Inger Berge Hagen |
ITK |
 |
Amalie Kolsgaard, |
Improved maritime vessel detection in camera images using Bag-of-Visual-Words | Annette Stahl, Rudolf Mester, Edmund Brekke |
ITK |
 |
Stefan Larsen, |
Robust Autonomous Docking for Passenger Ferries | Håkon Hagen Helgesen | ITK |
 |
Malene Liavaag, |
Design an autonomous passenger ferry for urban areas | Einar Hareide, Ole Andreas Alsos, Leander Spyridon Pantelatos |
ID |
 |
Øyvind Reppen Lunde, |
USV Control System Development for Autonomous AUV Recovery | Kristin Pettersen, Glenn Bitar, Else-Line Malene Ruud |
ITK |
 |
Brage Lytskjold, |
Improving Adaptive Stress Testing: Reinforcement Learning using Monte Carlo Tree Search with Neural Network Policies | Ole Jakob Mengshoel, Øyvind Smogeli |
IDI |
 |
Eivind Løvoll, |
Evaluating Collision Avoidance Algorithms in Urban and Semi-restricted Waters using Fuzzy Logic | Øyvind Smogeli, Emil Thyri |
IMT |
 |
Jooyoung Park, |
Graphical User Interface Design for a Remote Operator to Monitor and Control Multiple Autonomous Ferries | Ole Andreas Alsos | ID |
 |
Vedran Simic, |
Design an autonomous passenger ferry for urban areas | Einar Hareide, Ole Andreas Alsos, Leander Spyridon Pantelatos |
ID |
 |
Robin Stokke, |
Simulation-based simulator validation (of SITAW simulators) | Øyvind Smogeli, Erik Wilthil, Vinicius De Oliveira |
IMT |
 |
Johan Bakken Sørensen, |
Adaptive Stress Testing of Situational Awareness for an Autonomous Passenger Ferry | Øyvind Smogeli, Erik Wilthil, Børge Rokseth |
IMT |
 |
Iver Andreas Ugelvik, |
Localization for Ships and Ferries During Harbour Maneuvering and Docking | Håkon Hagen Helgesen | ITK |
 |
Jan-Marius Vatle, |
Adaptive Stress Testing for Safety Validation of Maritime Autonomous Collision Avoidance Systems | Ole Jakob Mengshoel, Øyvind Smogeli |
IDI |
MSc candidates 2020-2021
Name |
Topic | Supervisors | Dept. | |
 |
Kristian Auestad, |
Depth Estimation and Object Detection using Stereo Vision for Autonomous Ferry | Edmund Brekke Øystein Helgesen Annette Stahl |
ITK |
 |
Henrik Baldishol, |
Anti-kollisjon for autonome skip | Tor Arne Johansen Inger Hagen Edmund Brekke |
ITK |
 |
Thea Bergh, |
ENC-based Collision and Grounding Avoidance System for a Green-Energy Autonomous Surface Vehicle | Tor Arne Johansen Alberto Dallolio |
ITK |
 |
Torbjørn Fuglestad, |
Positioning and Sensor Fusion for Docking of Autonomous Ships | Tor Arne Johansen Håkon Hagen Helgesen |
ITK |
 |
Martin Eek Gerhardsen, |
Fiducial SLAM for autonomous ferry | Edmund Brekke Rudolf Mester |
ITK |
 |
Didrik Grove, |
Multi-sensor multi-target tracking using LIDAR and camera in a harbor environment | Edmund Brekke Giorgio Kufoalor |
ITK |
 |
Martin Græsdal, |
Self-Calibration of Stereo Vision for Autonomous Ferry | Edmund Brekke Øystein Helgesen Annette Stahl |
ITK |
 |
Aksel Heggernes, |
AI-based mission planning and control of green energy autonomous surface vessel | Tor Arne Johansen Alberto Dallolio |
ITK |
 |
Thomas Hellum, |
Multi-Sensor Stereoscopic Visual SLAM for Autonomous Automotive and Seaborne Vehicles | Edmund Brekke Rudolf Mester |
ITK |
 |
Ingunn Kjønås, |
Maritime Object Detection in LWIR-images using Deep Learning methods with Data Augmentation | Egil Eide Edmund Brekke Rudolf Mester Erik Wilthil Øystein Helgesen |
IES |
 |
Simen Knudsen, |
Model validation and berthing of an autonomous ferry | Tor Arne Johansen | ITK |
 |
Kristoffer Landsnes, |
Domain Adaptation for Detection of Maritime Vessels in Images | Edmund Brekke Øystein Helgesen |
ITK |
 |
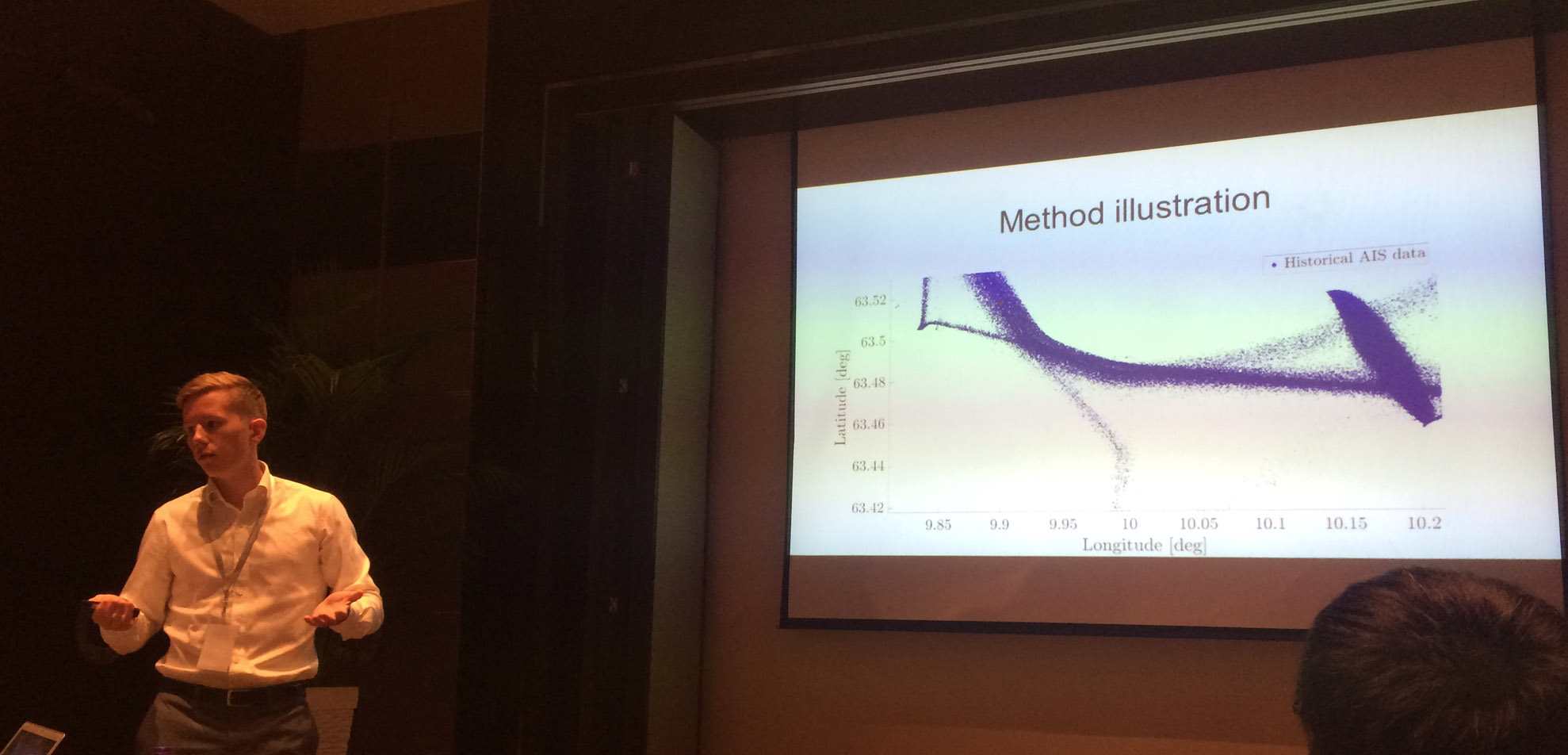
Håvard Skåra Mellbye, |
Gaussian Processes for long-term trajectory prediction using historical AIS data | Edmund Brekke Trym Tengesdal |
ITK |
 |
Kristoffer Nordvik, |
Dynamic positioning during launch and recovery for an unmanned autonomous ROV supply vessel | Tor Arne Johansen | ITK |
 |
Jonas Sagild, |
Track Level Fusion of Radar and AIS for Autonomous Surface Vessels | Edmund Brekke Audun Hem |
ITK |
 |
Magne Sirnes, |
Joint localization and tracking: a per-track error state approach | Edmund Brekke Egil Eide Rudolf Mester Erik Wilthil Øystein Helgesen |
ITK |
 |
Dinosshan Thiagarajah, |
Localization of Ferries using Monocular Camera, IMU, and GNSS during Automated Docking | Tor Arne Johansen Håkon Hagen Helgesen |
ITK |
|
Kjetil Vasstein, |
A high fidelity digital twin framework for testing exteroceptive perception of autonomous vessels | Edmund Brekke, Egil Eide, Øyvind Smogeli, Rudolf Mester, Tor Arne Johansen |
ITK |
 |
Hallvar Voilås, |
Development of an interface between the Autoferry's autonomy system and an external motion controller | Tor Arne Johansen Bjørn-Olav Holtung Eriksen |
ITK |
MSc candidates 2019-2020

















MSc candidates 2018-2019
























MSc candidates 2017-2018



















MSc candidates 2016-2017
Name |
Topic | Supervisors | Dept. | |
 |
Gina Havdal, |
Design of a Small Autonomous Passenger Ferry | Svein Aanond Aanondsen, Stein Haugen |
IMT |
 |
Christina Torjussen Heggelund, |
Design of a Small Autonomous Passenger Ferry | Svein Aanond Aanondsen, Stein Haugen |
IMT |
 |
Charlotte Hjelmseth Larssen, |
Design of a Small Autonomous Passenger Ferry | Svein Aanond Aanondsen, Stein Haugen |
IMT |
 |
Simen Hexeberg, |
AIS-based Vessel Trajectory Prediction for ASV Collision Avoidance | Edmund Brekke, Andreas Flåten, Bjørn-Olav Holtung Eriksen |
ITK |
 |
Paal Kristian Minne, |
Automatic testing of maritime collision avoidance algorithms | Edmund Brekke, Jon Arne Glomsrud, Bjørn-Olav Holtung Eriksen, Øystein Engelhardtsen |
ITK |
 |
Erik Liland, |
AIS Aided Multi Hypothesis Tracker - Multi-Frame Multi-Target Tracking Using Radar and the Automatic Identification System | Edmund Brekke, Andreas Flåten, Erik Wilthil |
ITK |
 |
Espen Johansen Tangstad, |
Visual Detection of Maritime Vessels | Edmund Brekke, Andreas Flåten, Håkon Hagen Helgesen |
ITK |
 |
Henrik Alfheim, |
Development of a Dynamic Positioning System for the ReVolt Model Ship | Morten Breivik, Edmund Brekke, Egil Eide, Øystein Engelhardtsen |
ITK |
 |
Kjetil Muggerud, |
Development of a Dynamic Positioning System for the ReVolt Model Ship | Morten Breivik, Edmund Brekke, Egil Eide, Øystein Engelhardtsen |
ITK |
 |
Einvald Serigstad, |
Hybrid Collision Avoidance for Autonomous Surface Vessels | Morten Breivik, Bjørn-Olav Holtung Eriksen |
ITK |
 |
Inger Berge Hagen, |
Collision Avoidance for ASVs Using Model Predictive Control | Tor Arne Johansen | ITK |
 |
Glenn Ivan Bitar, |
Towards the Development of Autonomous Ferries | Morten Breivik, Anastasios Lekkas |
ITK |
MSc candidates 2015-2016
Name |
Topic | Supervisors | Dept. | |
 |
Helene Myre, |
Collision Avoidance for Autonomous Surface Vehicles Using Velocity Obstacle and Set-Based Guidance | Edmund Brekke, Signe Moe, Bjørn-Olav Holtung Eriksen |
ITK |